 Analog Devices, Inc.
Analog Devices, Inc.
Avtor: Allen Fan
2018_267_28
V tem članku je opisano, kako izboljšati natančnost merjenja nagiba z uporabo merilnika pospeška kot komponente. Parkirne zavore (EPB) se uporabljajo na osebnih vozilih zato, da zadržijo vozilo na makadamu in asfaltiranih cestah.
Tipična uporaba merjenja nagiba
 To se doseže z merjenjem naklona z eno-osnim ali dvo-osnim merilnikom pospeška. Običajno je merilnik majhnega pospeška v oseh X, Y ali Z vgrajen v posebno ohišje in se nahaja znotraj EPB krmilne enote. Zdaj ima vedno več vozil vgrajeno funkcijo ESC (elektronski nadzor stabilnosti) kombinirano z merilnikom majhnih pospeškov in žiroskopom, vse v enem čipu. To je narejeno zato, da se prepreči stransko drsenje ali da bi se avto prekucnil, zato je zdaj ESC funkcija zakonsko zahtevana po vsem svetu. Če je merjenje nagiba narejeno z eno komponento (v enem čipu združen merilnik pospeška in žiroskop), potem ni nujno imeti samostojen EPB modul na vozilu, kar bi znatno zmanjšalo strošek vozila. Ker je ena komponenta uporabljena za ESC, ni optimizirana za zaznavanje nagiba in včasih natančnost merjenja nagiba s komponento ne ustreza zahtevam za natančnost. To pa zato, ker komponenta meri XY ali XYZ-osi, tipično pa uporablja X-os za merjenje nagiba. V nekaterih tradicionalnih merilnikih za majhne pospeške, ki so vgrajeni v EPB module, uporabljajo Z-os, ker je v motorju nameščen vertikalno. Os zaznavanja bi morala biti pravokotno na gravitacijo zaradi doseganja boljše natančnosti – kar bomo pokazali kasneje.
To se doseže z merjenjem naklona z eno-osnim ali dvo-osnim merilnikom pospeška. Običajno je merilnik majhnega pospeška v oseh X, Y ali Z vgrajen v posebno ohišje in se nahaja znotraj EPB krmilne enote. Zdaj ima vedno več vozil vgrajeno funkcijo ESC (elektronski nadzor stabilnosti) kombinirano z merilnikom majhnih pospeškov in žiroskopom, vse v enem čipu. To je narejeno zato, da se prepreči stransko drsenje ali da bi se avto prekucnil, zato je zdaj ESC funkcija zakonsko zahtevana po vsem svetu. Če je merjenje nagiba narejeno z eno komponento (v enem čipu združen merilnik pospeška in žiroskop), potem ni nujno imeti samostojen EPB modul na vozilu, kar bi znatno zmanjšalo strošek vozila. Ker je ena komponenta uporabljena za ESC, ni optimizirana za zaznavanje nagiba in včasih natančnost merjenja nagiba s komponento ne ustreza zahtevam za natančnost. To pa zato, ker komponenta meri XY ali XYZ-osi, tipično pa uporablja X-os za merjenje nagiba. V nekaterih tradicionalnih merilnikih za majhne pospeške, ki so vgrajeni v EPB module, uporabljajo Z-os, ker je v motorju nameščen vertikalno. Os zaznavanja bi morala biti pravokotno na gravitacijo zaradi doseganja boljše natančnosti – kar bomo pokazali kasneje.
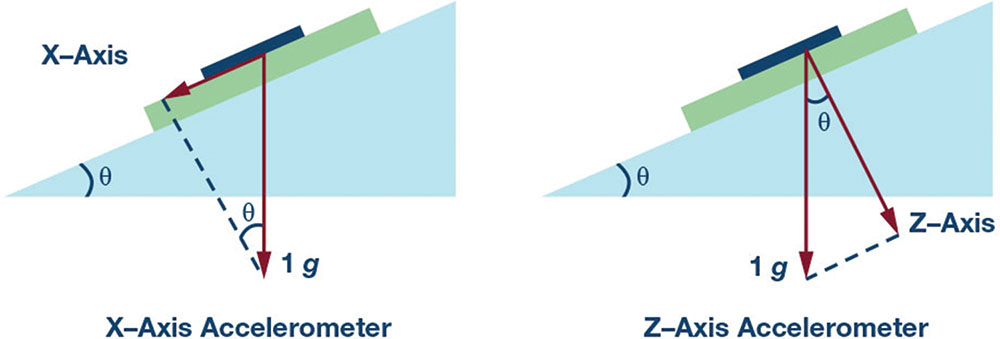
Pri merjenju nagiba vozila je zelo pomembno oceniti natančnost. Predstavljajte si, da je vaše vozilo parkirano na popolnoma ravnih tleh, tako da bi kot, ki bi ga dobili iz pospeškometra, moral biti 0°. Če bi bilo vaše vozilo parkirano na nagibu, bi to moralo biti natančno zaznano zato, da bi se sistem zavor ustrezno aktiviral.
![]()
Zato
![]()
kjer:
AOUT je izhod pospeškometra v g,
θ je nagib naklona v stopinjah.
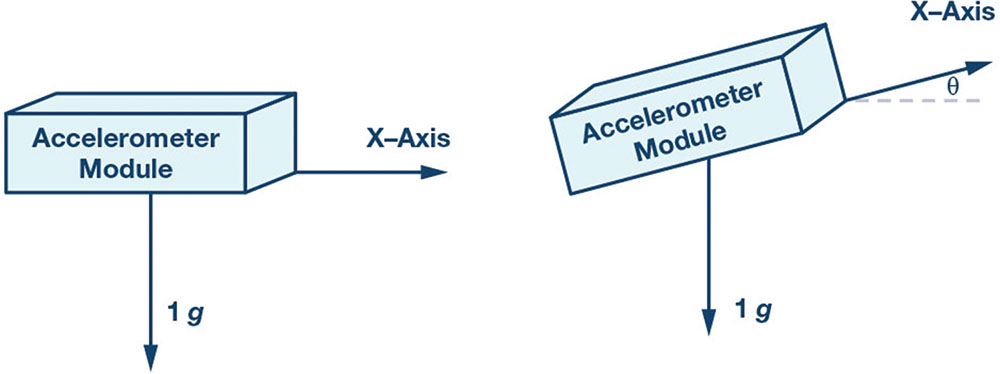
Ker je sin θ nelinearna funkcija, je razmerje med AOUT in θ nelinearno in ima najboljšo linearnost blizu nič, kar pomeni, da ima tam najboljšo natančnost. Ko θ narašča, se natančnost zmanjšuje. Zato naj bi bila os zaznavanja pravokotno na gravitacijo, saj bo naklon ceste blizu nič.
Za merjenje naklona na vozilih ni nujno uporabiti sistema s polnim naklonom. Večina cest v realnem svetu ne presega 30°. Mi moramo zgolj analizirati natančnost dejavnikov znotraj obsega ±30°.

Obstaja nekaj dejavnikov, ki bi lahko vplivali na merilno natančnost sistema:
- Napaka občutljivosti in začetni absolutni odmik (angl. offset)
- Nelinearnost
- Variacija skupnega odmika od začetne absolutne vrednosti
- Šum
Napaka občutljivosti in začetni absolutni odmik
Napaka občutljivosti

Občutljivost je naklon prenosne funkcije merjene na vhodih-izhodih, običajno pri +1g in -1g. Napaka občutljivosti je del delne deviacije občutljivosti. Na primer – nekateri pospeškometri imajo najvišjo občutljivost 3%.
Začetni absolutni odmik
Odmik znotraj obsega je okoli 25°C; na primer 25°C ± 5°C, merjeno takoj po izdelavi modula. Začetni absolutni odmik označuje standardni odmik izmerjenih vrednosti odmika pri veliki populaciji naprav.
Kalibracija v dveh točkah
Za merjenje nagiba se pojavita dve glavni napaki, ki izhajata iz napake odmika in napake občutljivosti. Ti dve napaki vodita v nesprejemljive zajete rezultate, zato jih ne smemo zanemariti. Če želimo odpraviti ti dve napaki, mora biti izhod pospeška kalibriran. Tipično obstaja kalibracija odmika in občutljivosti pri merjenju naklona, ki jo opravimo enkrat. Če upoštevamo napako občutljivosti, je razmerje med vhodom in izhodom pospeškometra sledeče:
![]()
Kjer:
- AOUTPUT je napaka odmika v g.
- Ojačenje (gain) je ojačenje pospeškometra, idealna vrednost je 1.
- AACTUAL je dejanski pospešek, ki deluje na pospeškometer v g.
Obstajata dve osnovni tehniki kalibracije; ena je kalibracija v eni točki. Ta kalibracija se naredi tako, da pospeškometer damo v polje z 0 g in merimo izhod. Ta vrsta kalibracije bi lahko bila uporabljena za kalibracijo odmika, pri tem da napake ojačenja ne moremo kalibrirati. Nato izmerjeni izhod v 0 g polju odštejemo od dejanske vrednosti izhoda s čemer odstranimo napako odmika. To je enostavna metoda za kalibracijo, vendar ne za natančnost, ker še vedno obstaja napaka občutljivosti.
Naslednji način je kalibracija z 1 g obračanjem, ki bi uporabila dvotočkovno kalibracijo pri + 1 g in – 1 g, in v vsakem polju vrednosti + 1 g in – 1 g meri izhod pospeška kot spodaj:
![]()
kjer je odmik, AOFFSET, v g.
Iz teh dvotočkovnih informacij lahko izluščimo odmik in ojačenje kot sledi:
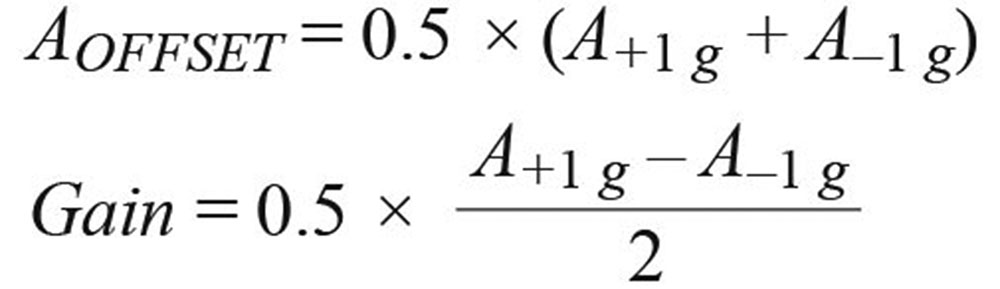

Kjer +1 g in −1 g meritve, A+1 g in A–1 g, so v g.
Po tej kalibraciji, ki jo opravimo enkrat, lahko dejanski pospešek izračunamo z naslednjo formulo, v kateri odstranimo napako odmika in občutljivosti.
![]()
Kjer sta AOFFSET in AOUT v g.
Nelinearnost
Nelinearnost vezja je največja deviacija med izmerjenim pospeškom (AMEA) in idealnim linearnim izhodnim pospeškom (AFIT). Podatkovni niz meritve pospeška naj vključuje polni obseg pospeškometra. Izmerjen je kot Max(|AMEA – AFIT|).
Kjer:
- AMEA je izmerjen pospešek definiran kot gn.
- AFIT I je napovedan pospešek definiran kot gn.
Večina pospeškometrov ali sestavljenih vezij je nelinearna na danem vhodnem obsegu pospeškometra – na primer obseg 30 mg ± 2 g. Za aplikacije merjenja nagiba je vhodni nagib znotraj ±30°, kar pomeni, da bo izhodni obseg pospeška znotraj ±500 mg (±1 g × sin 30°), zato mora biti nelinearnost znotraj tega področja ponovno ocenjena. Ker nelinearnost ni linearna preko celotnega vhodnega obsega, je težko oceniti ta del napake natančno in kvantitativno. Ker pa so podatki za ta element običajno zelo konservativni glede nelinearnosti pri 30 mg z vhodnim obsegom ±2 g, bi bilo smiselno uporabiti 10 mg za izračun napake znotraj ±500 mg.
Skupna variacija odmika od začetnega absolutnega odmika
Skupna variacija odmika od začetnega absolutnega odmika je maksimalna deviacija odmika, ki ga povzročijo temperatura, stres in staranje. Ta deviacija je merjena relativno na začetni absolutni odmik za dano vezje. To je glavni doprinos k skupni napaki natančnosti.
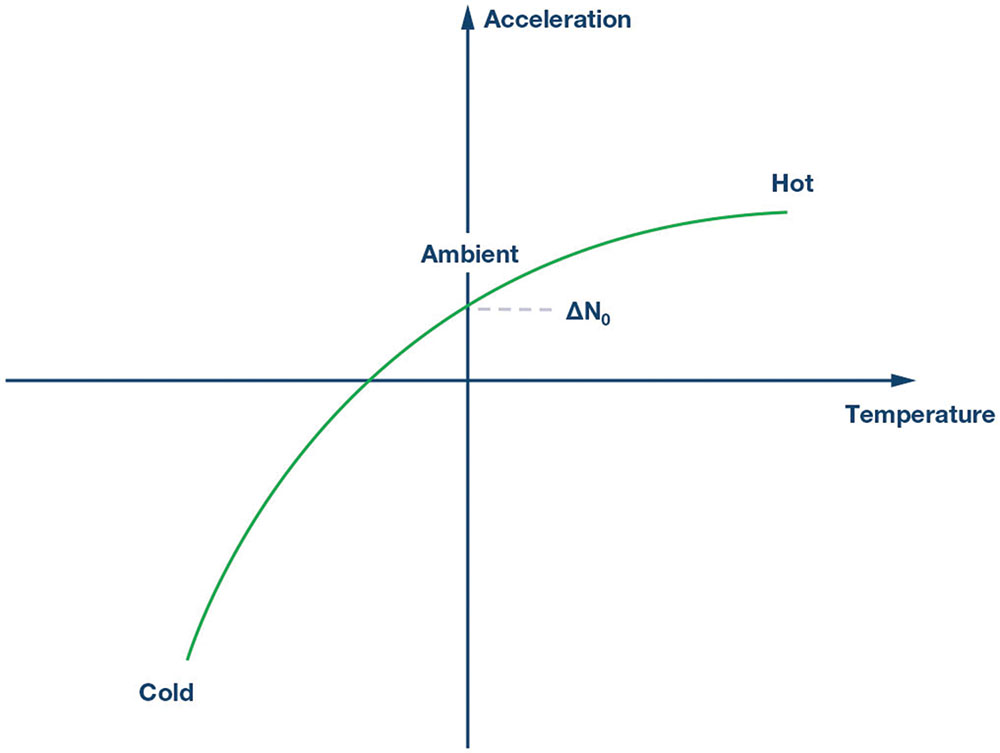
Izmed vseh teh faktorjev, kot temperatura, stres, staranje itd. sprememba temperature prispeva večino odstotkov k skupni variaciji odmika. Tipično je vpliv temperature krivulja drugega reda, ki je običajno rotirana parabola. Da bi odpravili ta del napake, bi lahko opravili kalibracijo v treh točkah na sistemskem nivoju. Za dano vezje drsenje izhoda glede na temperaturo lahko kalibriramo s sledečimi koraki.

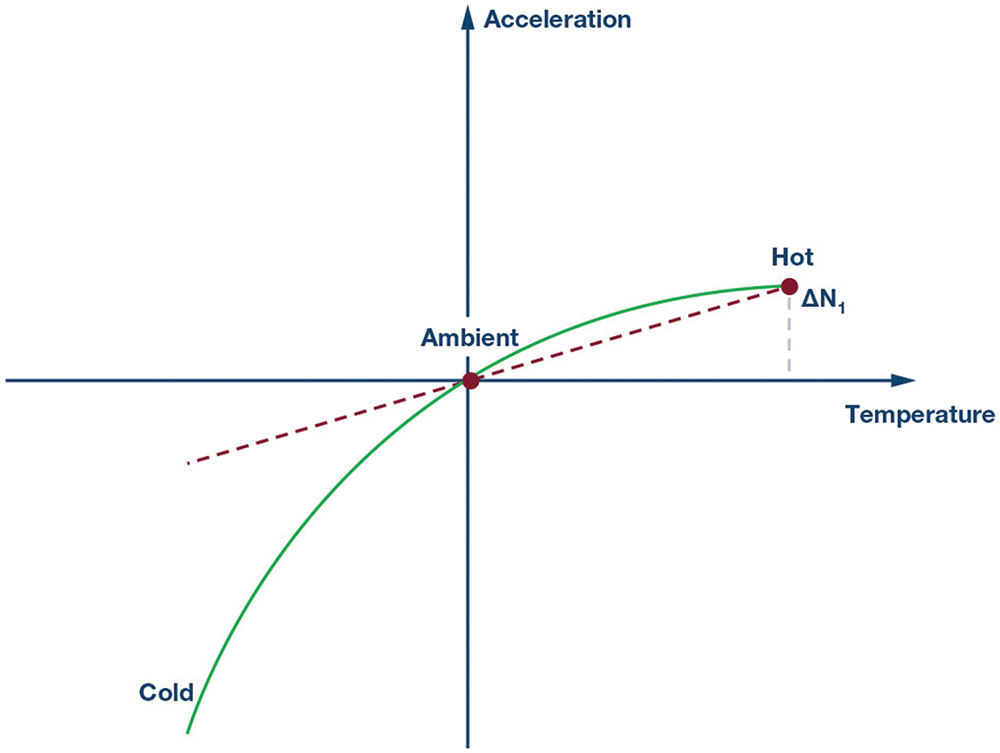
1. korak:
Izhodni odziv vezja je premaknjen za neko vrednost ΔN0. Prvi korak v procesu temperaturne kalibracije je odstranitev odmika glede na okolje.
2. korak:
Nato se vezje testira pri visoki temperaturi in ta nova informacija je uporabljena zato, da se generira linearna enačba za korekcijo odmika.
3. korak:
Komponenta drugega reda je dodana v obstoječo enačbo zato, da bi zagotovila pravilni ostanek za odmik. Predpostavimo, da krivulja drugega reda ustreza enačbi spodaj:
![]()


To je formula za parabolo drugega reda, v kateri je rotacijska komponenta izničena preko korakov 1 in 2.
Ta parabola drugega reda ima tri rešitve te formule:
![]()
Nato lahko dobimo tempco a, b, c.
Vse tempco informacije o ΔN0, ΔN1, ΔN2, a, b, c morajo biti shranjene v trajnem pomnilniku, poleg tega je potreben tudi temperaturni senzor na plošči. Sistem bi kalibriral pospeškometer rutinsko ob vsakem vklopu, s čemer bi zagotovil preprečitev drsenja glede na temperaturo.
Šum
Izvedba merjenja nagiba baziranega na enem vzorcu podatkov morda ne bo zanesljiva. Če tudi pospeškometer ne bi imel šuma, so meritve nagiba narejene na vklopljenem avtu, zato je potrebno kakršne koli ali vse vibracije, ki jih povzroča motor, mimo vozeča vozila ali premiki potnikov znotraj avtomobila, ublažiti. Najboljši način za to je poprečenje podatkov tako dolgo, kot je možno, pri tem pa ne smemo pasti pod najnižje zahteve za prenos podatkov. To poprečenje bo znižalo RMS šum.
| Prispevek napake | Pred kalibracijo | Po kalibraciji | Ukrepi za kalibracijo |
| Napaka občutljivosti | 30 mg | 0 mg | Dvo-točkovna kalibracija |
| Začetni absolutni odmik | 15 mg | 0 mg | Dvo-točkovna kalibracija |
| Nonlinearity | 10 mg preko ±500 mg | 10 mg preko ±500 mg | None |
| Variacija skupnega odmika | 50 mg | 10 mg | Tri-točkovna kalibracija |
| Noise | 24 mg | 2.4 mg | 100× poprečenje |
| Skupna napaka | 129 mg | 22.4 mg | |
| Natančnost | 7.4° (najslabši primer) | 1.28° (najslabši primer) | V stopinjah |
Tabela 1: Prispevek napake z/brez kalibracije
Če predpostavimo, da zajemamo šum, dobimo na vzorec varianco
![]()
Poprečenje naključnih spremenljivk vodi v sledeče variance,
![]()
ker je varianca šuma konstanta pri σ2,

Dokaz, da n poprečenje istega nekoreliranega šuma zmanjša šumno moč s faktorjem n in RMS šum bi bil zmanjšan za √n.
Ker je naključni šum pogojen z Gaussovo distribucijo, je RMS šum ekvivalenten standardni deviaciji Gaussove distribucije. Minimalna populacija znotraj 6σ znaša 97%.
Na primer, če vsakih 100 ms poprečite podatke pri 1 kSPS, potem bo najvišji RMS šum = 0,4 mg, kar pomeni, da kalkulacija vršnega šuma na tej točki znaša zgolj 2,4 mg, če smo uporabili 6σ kot razdaljo od glavne vrednosti.
Faktorji, s katerimi množite RMS vrednost so odvisni od statističnih potreb profila misije za to komponento. Če na primer izberete 6 kot faktor (vršna vrednost šuma znaša 6 x RMS_Šuma), pomnoženo s številom prehodov algoritma v življenjski dobi, bi to vplivalo na verjetnost, ki presega najslabši možni scenarij. Teoretično bo faktor za pomnožitev RMS šuma določil čas okvare preko življenjske dobe, saj je šum naključna spremenljivka v času in ni predvidljiv, lahko pa ga izračunamo statistično. Recimo za EPB module je doba delovanja preko življenjske dobe 146000 (to je 20 krat na dan za dobo 20 let). Če nobena napaka ni dovoljena v življenjski dobi, bo najvišja stopnja napake 1/146000 = 0,00068%. Glede na nivo sigme v Gaussovi distribuciji bo vrednost sigme 6 generirala 0,00034% procent okvare, zato je lahko uporabljen kot ta faktor, kar ustreza 146000 x 0,00034% = 0.5 kar je manjše od 1. Zato statistično ne bo nobene odpovedi EPB modula v času življenjske dobe 20 let, če vzamemo število 6 kot RMS faktor multiplikacije.
To lahko povzamemo kot:
![]()
E je pričakovan čas, ki presega najslabšo možnost v življenjski dobi, M je življenjska doba in r je verjetnost preseganja v najslabšem primeru. Na podlagi tega lahko ocenimo razumen faktor, tako da pomnožimo RMS šum.
Povzetek
S tem, ko uporabimo ADI-jeve ADXC1500/ADXC1501 (kombiniran žiroskop in 2-osni/3-osni pospeškometer) kot primer, so vsi elementi prispevka za napako navedeni v tabeli 1 z ali brez kalibracijskih ukrepov. Predpostavljamo, da je celotna razlika v odmiku krivulja drugega reda, pri čemer odstopanja nad temperaturo prispevajo 80% celotne variacije odmikov. Tudi vzemite 6 kot faktor, pomnožen z največjim RMS šumom.
Ta kombinacija žiroskopa in triosnega pospeškometra omogoča veliko novih aplikacij, še posebej v sistemih avtomobilske varnosti in aplikacijah industrijske avtomatizacije. Zmanjševanje teh velikih virov napak je ključnega pomena za oblikovanje zanesljivejših in natančnejših sistemov za varnost avtomobilov, kot so robusten elektronski nadzor stabilnosti (ESC) in odkrivanje prevračanja. Te se gradijo na tradicionalnih sistemih za nadzor šasije, ki so že v vozilu, vključno s protiblokirnim zavornim sistemom, krmiljenjem vlečne sile in krmiljenjem zavor.
Zahvala
Rad bi se zahvali mojim kolegom, Matthewu Hazel in Brianu Larivee, da sta mi zagotovila veliko uporabnih misli pri tem članku.
Allen Fan [allen.fan@analog.com] je aplikacijski inženir pri ADI China Automotive prodajni ekipi. Odgovoren je podporo in promocijo radarskih, IMU, močnostnih in infotainment proizvodov na Kitajskem. Prejel je naziv diplomirani inženir iz matematike na Shan Dong Univerzi.
{kind=link}