![]()
32-bitni mikrokontrolerji prinašajo v svetova elektrotehnike in računalništva povsem nove dimenzije: hitrost, odzivnost, sorazmerno veliko pomnilnika in strojno podprto digitalno generiranje ter procesiranje signalov.
 V preteklem nadaljevanju smo v teoretičnem delu spoznali strojni primerjalnik analognih vrednosti napetosti in enoto za merjenje časa polnjenja, oziroma kapacitivnosti. Novo znanje bomo uporabili tudi v praktičnem delu. Nato se bomo lotili izdelave daljinsko vodenega vozila iz kock LEGO in spoznali, da je pomembno predvsem veselje do sestavljanja.
V preteklem nadaljevanju smo v teoretičnem delu spoznali strojni primerjalnik analognih vrednosti napetosti in enoto za merjenje časa polnjenja, oziroma kapacitivnosti. Novo znanje bomo uporabili tudi v praktičnem delu. Nato se bomo lotili izdelave daljinsko vodenega vozila iz kock LEGO in spoznali, da je pomembno predvsem veselje do sestavljanja.
V poglavju Zgradba in delovanje bomo predstavili podporo za med mikrokontrolersko vodilo, CAN (angl. controller area network), ki ga uporabljajo številni izdelovalci avtomobilov. Morda ga res prav pogosto ne potrebujemo, a je lahko nepogrešljiv, če PIC32 uporabimo kot vmesnik za povezavo PC-ja z avtomobilsko diagnostično vtičnico.
Poglavje »V praksi« pa tokrat začenjamo s PIC32 in ESP8266 ter funkcionalnostmi, ki dajejo PIC32 prednost pred drugimi mikrokontrolerji pri vstopu v Internet stvari. Predelan rudarski tovornjak LEGO na daljinsko vodenje iz preteklega nadaljevanja bo tokrat dobil upravljane smeri s pomočjo smernega kota, saj bomo dodali analogni »enkoder« in dopolnili vgrajeno programsko opremo. Priključili bomo tudi ultrazvočno tipalo, ki ga bomo uporabili za merjenje razdalje do ovir.
Zgradba in delovanje
Visoko zmogljiv modul CAN
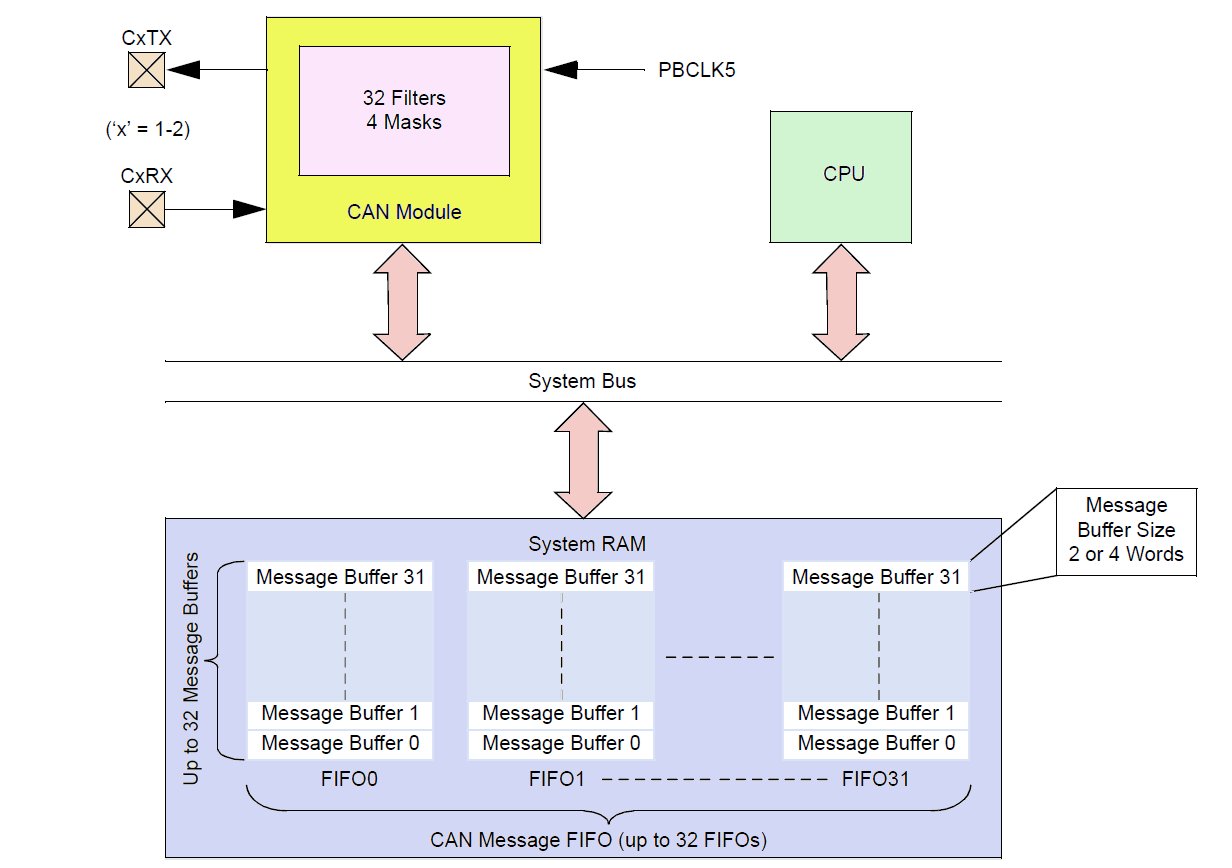
 CAN vodilo je prilagojeno za sporočilne komunikacijske protokole. Večina mikrokontrolerjev iz družine PIC32MZ ima vgrajena po dva komunikacijska modula CAN po standardu CAN 2.0B s hitrostjo prenosa podatkov do 1 Mbit/s, razen poddružine PIC32MZxxxxECGyyy, ki CAN ne podpira. Po drugi strani, imajo vgrajeno podporo za CAN v družini PIC32MX samo nekateri člani poddružin PIC32MX5xx in PIC32MX7xx. Vendar imajo po dva modula le člani PIC32MX7xx.
CAN vodilo je prilagojeno za sporočilne komunikacijske protokole. Večina mikrokontrolerjev iz družine PIC32MZ ima vgrajena po dva komunikacijska modula CAN po standardu CAN 2.0B s hitrostjo prenosa podatkov do 1 Mbit/s, razen poddružine PIC32MZxxxxECGyyy, ki CAN ne podpira. Po drugi strani, imajo vgrajeno podporo za CAN v družini PIC32MX samo nekateri člani poddružin PIC32MX5xx in PIC32MX7xx. Vendar imajo po dva modula le člani PIC32MX7xx.
Zmogljivost vsakega od modulov CAN je na videz precej impresivna, saj ima do 32 sporočilnih izravnalnikov, od katerih lahko vsak hrani po največ 32 sporočil. Vendar ima vgrajeno tudi podporo za neposredne pomnilniške prenose (DMA, angl. direct memory access) in lastne kanale DMA. Zato sicer ni odvisen od delovanja in stanja krmilnika DMA, si pa lahko prilasti zajeten del glavnega pomnilnika (RAM), ki ga je potem manj za druga opravila.
Programiranje PIC32 (13)
2016_SE239_42
{kind=link}