![]()
V številki SE249 smo povedali nekaj o napravah, ki zajemajo možganske valove in o njihovem delovanju na bolj podrobni ravni. V tej številki pa se bo teoretično znanje, pridobljeno v prejšnjem članku, praktično uporabilo.
 Daljinec
Daljinec

Daljinec ali oddajnik deluje tako, da bere pozicijo ročk. (Slika 1) To preprosto doseže s potenciometrom. Na konce priključi napajanje, ki je po navadi 5V, iz drsnika pa prebira napetost, ki se spreminja s premikanjem ročk. To napetost nato pretvori v digitalne signale, ki jih po anteni pošlje sprejemniku. Sprejemnik jih nato dekodira, a jih ne spremeni v analogne napetosti. Na izhodu sprejemnika se namreč pojavi pulzno širinska modulacije (PWM). (Slika 2) S spreminjanjem širine pulza se določa smer servomotorja ali hitrost letala.
Načrtovanje vezja
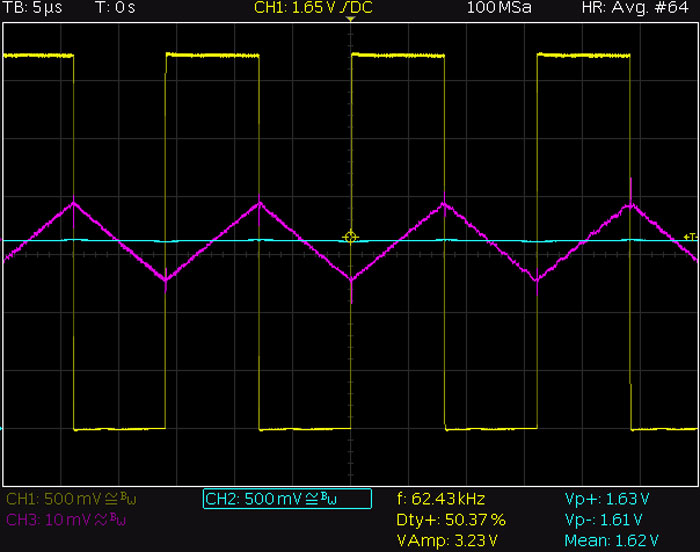
 Vsi podatki o delovanju daljinca so pri tem delu še posebej pomembni, saj je potrebno vezje prilagoditi našim potrebam. Vemo, da daljinec bere analogno napetost, ki jo potem pretvori in pošlje. To nam pove, da moramo s krmilnikom zapisovati analogno napetost na vhod daljinca. Ker se pri tem projektu uporablja Arduino, je potrebno dodati nekaj zunanjih komponent. Arduino ima sicer možnosti analognega zapisa napetosti (analogWrite()), a se mnogo ljudi ne zaveda, da to ni prava analogna napetost. Z vnašanjem vrednosti od 0 do 255 v funkcijo analogWrite() spreminjano pulzno širino signala, kar pa niti približno ni stalna analogna napetost. Da pridemo do take napetosti, je potrebno PWM signal peljati skozi RC filter (Low pass filter). (Slika 3) Ko je PWM signal na 1 oz. HIGH, se preko upora polni kondenzator. Ko pa je PWM na 0 oz. LOW, se kondenzator prazni in tako zapolni LOW področja na izhodu. Tako na izhodu dobimo več ali manj stalno napetost. Če bi to pobližje pogledali, bi videli, da nastane signal podoben trikotnemu, ki ima amplitudo nekaj mV (to je odvisno od kondenzatorja in upora).
Vsi podatki o delovanju daljinca so pri tem delu še posebej pomembni, saj je potrebno vezje prilagoditi našim potrebam. Vemo, da daljinec bere analogno napetost, ki jo potem pretvori in pošlje. To nam pove, da moramo s krmilnikom zapisovati analogno napetost na vhod daljinca. Ker se pri tem projektu uporablja Arduino, je potrebno dodati nekaj zunanjih komponent. Arduino ima sicer možnosti analognega zapisa napetosti (analogWrite()), a se mnogo ljudi ne zaveda, da to ni prava analogna napetost. Z vnašanjem vrednosti od 0 do 255 v funkcijo analogWrite() spreminjano pulzno širino signala, kar pa niti približno ni stalna analogna napetost. Da pridemo do take napetosti, je potrebno PWM signal peljati skozi RC filter (Low pass filter). (Slika 3) Ko je PWM signal na 1 oz. HIGH, se preko upora polni kondenzator. Ko pa je PWM na 0 oz. LOW, se kondenzator prazni in tako zapolni LOW področja na izhodu. Tako na izhodu dobimo več ali manj stalno napetost. Če bi to pobližje pogledali, bi videli, da nastane signal podoben trikotnemu, ki ima amplitudo nekaj mV (to je odvisno od kondenzatorja in upora).
Branje možganskih valov (2)
2017_SE251_55
{kind=link}