![]() V tem članku boste našli matematične formule z izračuni in navodila inženirjem, kako narediti elektronski kompas s kompenzacijo nagiba. E-kompas uporablja merilnike pospeška v treh oseh in tri osi magnetometra. Merilnik pospeška meri komponente zemljine gravitacije, magnetometer pa meri komponente zemeljskega magnetnega polja (geomagnetno polje). Ker sta oba, merilnik pospeška in magnetometer nameščena na ploščici tiskanega vezja, se prebrane vrednosti spreminjajo glede na njihovo položaj na tiskanem vezju.
V tem članku boste našli matematične formule z izračuni in navodila inženirjem, kako narediti elektronski kompas s kompenzacijo nagiba. E-kompas uporablja merilnike pospeška v treh oseh in tri osi magnetometra. Merilnik pospeška meri komponente zemljine gravitacije, magnetometer pa meri komponente zemeljskega magnetnega polja (geomagnetno polje). Ker sta oba, merilnik pospeška in magnetometer nameščena na ploščici tiskanega vezja, se prebrane vrednosti spreminjajo glede na njihovo položaj na tiskanem vezju.
 Če je ploščica tiskanega vezja vedno v vodoravnem položaju, potem bi smer, kamor kaže kompas lahko izračunali iz razmerja arkus tangens dveh komponent horizontalnega magnetnega polja. Ker pa ima na splošno lahko ploščica tiskanega vezja kakršnokoli usmerjenost, bo prikazana smer kompasa funkcija vrednosti obeh, pospeška in magnetometra v vseh treh oseh.
Če je ploščica tiskanega vezja vedno v vodoravnem položaju, potem bi smer, kamor kaže kompas lahko izračunali iz razmerja arkus tangens dveh komponent horizontalnega magnetnega polja. Ker pa ima na splošno lahko ploščica tiskanega vezja kakršnokoli usmerjenost, bo prikazana smer kompasa funkcija vrednosti obeh, pospeška in magnetometra v vseh treh oseh.
Algoritem elektronskega kompasa s kompenzacijo nagiba izračuna kote odklona vseh treh osi iz ničelnega položaja, kar določa trenutno usmeritev ploščice TIV. Isti algoritem lahko torej uporabimo tudi za oblikovanje 3 D kazanja smeri, jih ga tudi opredelimo s koti odklona vseh treh osi od začetnega (ničelnega) položaja.

 Natančnost elektronskega kompasa je močno odvisna od izračuna in programskim odštevanjem stresanih magnetnih polj tako znotraj kot tudi v bližini magnetometra na PCB. Po dogovoru so ta magnetna polja razdeljena na tista, ki so stalna (imenovana Hard Iron effects) in tista, ki jih povzroča geomagnetno polje (imenovana Soft Iron effects). V vsako ničelno izravnavo magnetnega polja v magnetometru so običajno vključeni tudi že učinki stalnih magnetnih polj tiskanega vezja, zato se istočasno tudi kalibrira.
Natančnost elektronskega kompasa je močno odvisna od izračuna in programskim odštevanjem stresanih magnetnih polj tako znotraj kot tudi v bližini magnetometra na PCB. Po dogovoru so ta magnetna polja razdeljena na tista, ki so stalna (imenovana Hard Iron effects) in tista, ki jih povzroča geomagnetno polje (imenovana Soft Iron effects). V vsako ničelno izravnavo magnetnega polja v magnetometru so običajno vključeni tudi že učinki stalnih magnetnih polj tiskanega vezja, zato se istočasno tudi kalibrira.
Ta dokument opisuje preprost model s tremi elementi za kompenzacijo stalnih stresanih magnetnih polj. Model s temi tremi elementi bi moral ustrezati mnogim situacijam. Za lažjo predstavo preostanek tega dokumenta predpostavlja, da bi bil elektronski kompas uporabljen v mobilnem telefonu.
Koordinatni sistem in nastavitev ploščice

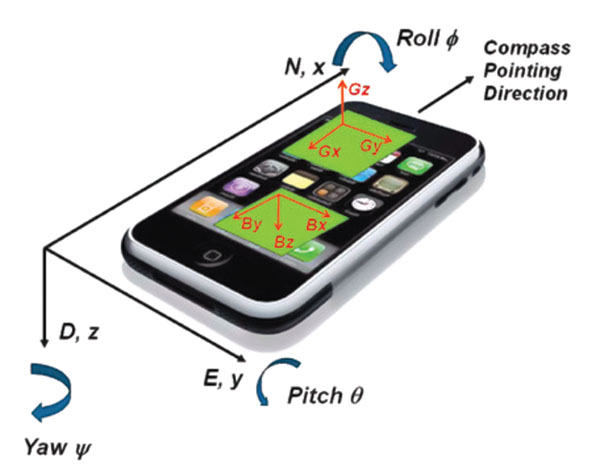
 Opis te aplikacije uporablja označevanje osi glede na koordinatni sistem mobilnega telefona po industrijskem standardu „NED« (North, East, Down). Os “X” telefona je smer, kamor kaže e-kompas; osi “Y” kaže na desno in “Z” os kaže navzdol (glej sliko 1).
Opis te aplikacije uporablja označevanje osi glede na koordinatni sistem mobilnega telefona po industrijskem standardu „NED« (North, East, Down). Os “X” telefona je smer, kamor kaže e-kompas; osi “Y” kaže na desno in “Z” os kaže navzdol (glej sliko 1).
Ob sliki 1 naj omenimo še nekaj izrazov, ki nas bodo spremljali v članku. Pitch z oznako θ je vzdolžni nagib telefona ali vrtenje okrog Y osi. Roll z oznako φ je bočni nagib telefona ali vrtenje okrog X osi. Yaw z oznako Ψ je smer vzdolžne osi telefona ali vrtenje okrog osi Z.
![]()
![]() Pozitiven Yaw kot ψ je opredeljen kot vrtenje v smeri urinega kazalca okoli pozitivne osi z. Podobno sta pozitivni kot θ in pozitivni kot φ definirana kot rotaciji v smeri urinega kazalca v pozitivni y in pozitivni x osi.
Pozitiven Yaw kot ψ je opredeljen kot vrtenje v smeri urinega kazalca okoli pozitivne osi z. Podobno sta pozitivni kot θ in pozitivni kot φ definirana kot rotaciji v smeri urinega kazalca v pozitivni y in pozitivni x osi.
Elektronski kompas s kompenzacijo nagiba
{kind=link}