Podjetje NXP Semiconductors N.V. (NASDAQ: NXPI) je predstavilo svoje nove procesorje za slikovne radarje S32R47 v 16 nm tehnologiji FinFET, ki temeljijo na NXP-jevem dokazanem strokovnem znanju na področju slikovnih radarjev.
Tretja generacija procesorjev za slikovne radarje zagotavlja do dvakrat večjo procesno moč v primerjavi s prejšnjo generacijo ter izboljšane sistemske stroške in energetsko učinkovitost. V kombinaciji z NXP-jevimi mmWave radarskimi oddajniki, upravljanjem energije in omrežnimi rešitvami v vozilu, družina S32R47 izpolnjuje zahteve funkcionalne varnosti ASIL ISO 26262 ASIL B(D) in pripravlja avtomobilsko industrijo na nove ravni avtonomne vožnje.
Ključne lastnosti:
Družina S32R47 so najzmogljivejši radarski procesorji podjetja NXP, ki ustrezajo zahtevnim zahtevam avtonomne vožnje ravni 2+ do 4.
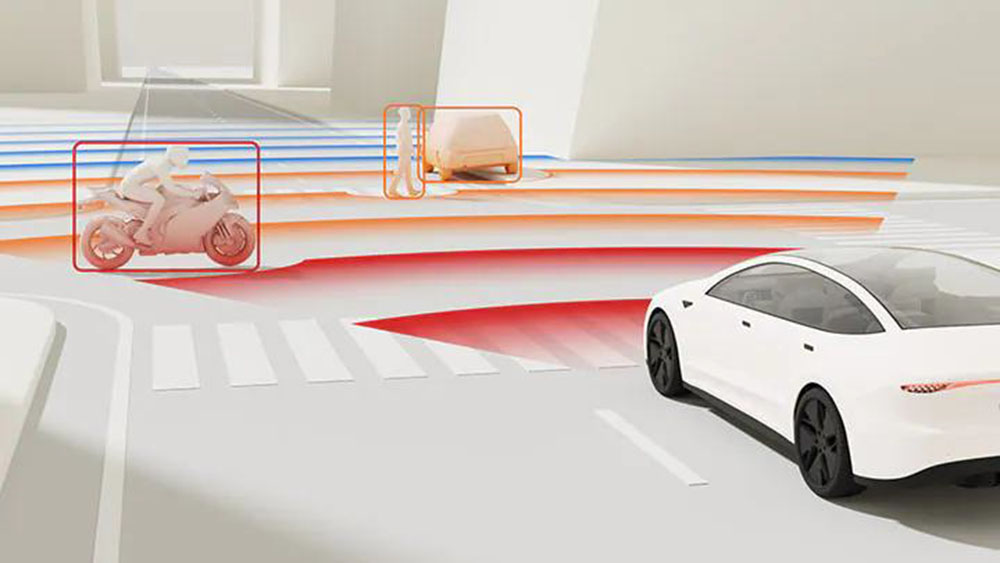
Zaznavanje z višjo ločljivostjo omogoča napredne primere uporabe, kot je odkrivanje ranljivih udeležencev v prometu (VRU) in izgubljenega tovora.
Več računskih zmogljivosti omogoča OEM proizvajalcem razvoj naprednih aplikacij, kot je navigacija na avtopilotu, hkrati pa v velikem obsegu izpolnjuje zahteve prihodnjih programsko opredeljenih vozil (SDV).
Po podatkih poročila Status of the Radar Industry 2024 podjetja Yole Intelligence, bo do leta 2029 približno 40 % vozil, ki bodo zapeljala na ceste, osebnih avtomobilov s stopnjo avtomatizacije vožnje 2+(L2+)/3 (L3) in vedno več vozil s stopnjo 4 (L4). Za hitro rastoči trg avtonomne vožnje za vozila SDV morajo proizvajalci originalne opreme in dobavitelji prvega reda izboljšati zmogljivost radarja, saj je ta bistvena za varne in napredne funkcije avtonomne vožnje, kot sta pilotska vožnja ali popolnoma avtomatizirano parkiranje.
Meindert van den Beld, višji podpredsednik in generalni direktor za radarje in ADAS, je dejal:
»S32R47 lahko v realnem času učinkovito obdela trikrat ali več antenskih kanalov kot današnje proizvodne rešitve. Omogoča izboljšano ločljivost, občutljivost in dinamični razpon slikovnega radarja, ki jih zahtevajo zahtevni primeri uporabe avtonomne vožnje, hkrati pa še vedno izpolnjuje stroge cilje glede porabe energije in stroškov sistema, ki jih proizvajalci originalne opreme določajo za serijsko proizvodnjo.«
Slikovni radar uporablja bogatejše podatke o oblaku točk za podrobnejše modeliranje okolja. To je ključni dejavnik za sisteme zaznavanja na podlagi umetne inteligence, ki omogočajo asistirano in avtonomno vožnjo v najzahtevnejših okoljskih pogojih, kot so zapleteni mestni scenariji.
S32R47 vključuje visokozmogljiv večjedrni sistem za obdelavo radarskih podatkov, ki omogoča gostejše izpise oblaka točk in izboljšane algoritme, ki omogočajo ADAS sisteme naslednje generacije. To omogoča boljšo ločljivost predmetov, večjo zanesljivost zaznavanja in natančnejšo klasifikacijo predmetov, kot so ranljivi udeleženci v prometu ali izgubljen tovor.
NXP-jeva 3. generacija rešitev za procesorje za slikovne radarje
Nova rešitev, ki temelji na znanju in preverjeni tehnologiji prejšnjih dveh generacij, zagotavlja do dvakrat večjo zmogljivost obdelave v radarskem MPU in 38 % manjšo površino integriranega vezja. Vključuje tudi podporo AI/ML za funkcije, kot sta izboljšana obdelava smeri prihoda (DoA) in klasifikacija objektov.
NXP-jeve naslednje generacije slikovnih radarskih rešitev omogočajo nove slikovne radarje z optimiziranim računom materiala in večjo razširljivostjo v smislu antenskih kanalov in zmogljivosti obdelave.
NXP-jeva rešitev dosega primerljivo ali boljšo zmogljivost z do 89 % manj antenskimi kanali kot alternativne rešitve, kar rešuje izzive integracije z manjšimi stroški, velikostjo in porabo energije sistema.
Če želite izvedeti več, obiščite S32R47 Imaging Radar Processors [1]
NXP-jev portfelj radarjev
Nova NXP-jeva rešitev za obdelavo radarjev S32R47, ki se že vzorči pri vodilnih strankah in je namenjena OEM platformam naslednje generacije, temelji na celovitem in razširljivem portfelju rešitev za radarsko zaznavanje, prilagojenih za vedno bolj raznolike primere uporabe in arhitekture OEM proizvajalcev, od radarja za zaznavanje vogalov do radarja za slikanje 4D visoke ločljivosti. Platforma S32R ponuja skupno arhitekturo za ponovno uporabo programske opreme in hiter razvoj, skupaj z visoko zmogljivim strojnim varnostnim pogonom, podporo za posodobitve preko OTA in skladnostjo z najnovejšimi standardi kibernetske varnosti.
Viri:
1: https://www.nxp.com/products/processors-and-microcontrollers/s32-automotive-platform/s32r-radar-processing/s32r47-high-performance-imaging-radar-processor-for-automotive-and-industrial-applications:S32R47
2: https://www.nxp.com/products/processors-and-microcontrollers/s32-automotive-platform/s32r-radar-processing:S32R-FAMILY
Povzeto po:
https://www.nxp.com/company/about-nxp/newsroom/NW-NXP-UNVEILS-THIRD-GENERATION-RADAR
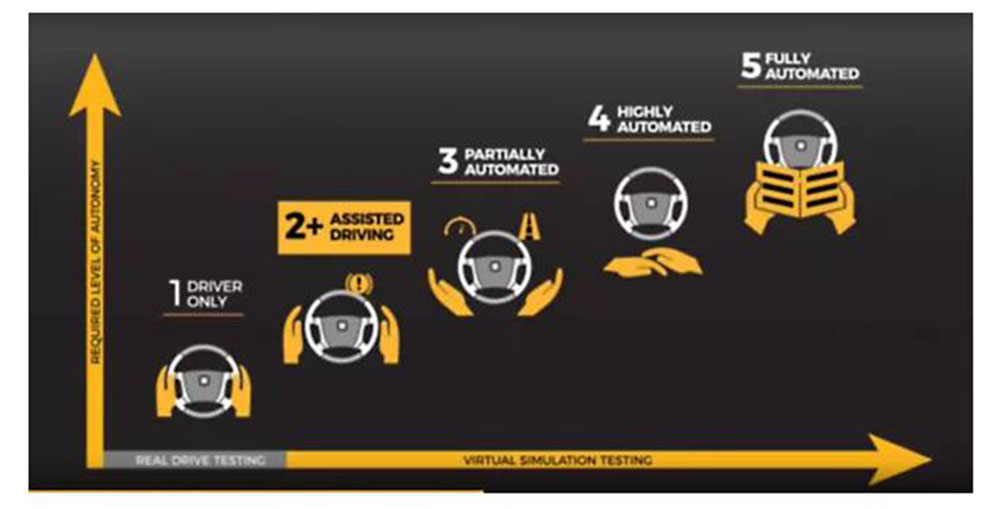
Stopnje avtomatizirane vožnje
L0: Ni avtomatizirane vožnje, vozilo nadzira voznik
L1: Pomoč pri vožnji: To je najnižja stopnja avtomatizirane vožnje, ki vključuje enostavne pripomočke za varno vožnjo, kot je npr. radar za zaznavanje prekratke razdalje do vozila spredaj.
L2: Delno avtomatizirana vožnja: To pomeni napredne sisteme za pomoč vozniku ali ADAS. Vozilo lahko nadzoruje krmiljenje in pospeševanje/upočasnjevanje. Pri tem avtomatika ne ustreza samovozeči vožnji, saj na voznikovem sedežu sedi človek, ki lahko kadar koli prevzame nadzor nad vozilom. Sistema Tesla Autopilot in Cadillac (General Motors) Super Cruise se uvrščata v stopnjo 2.
L3: Pogojna avtomatizirana vožnja: Preskok z 2. na 3. stopnjo je s tehnološkega vidika precejšen, s človeškega vidika pa neznaten ali celo zanemarljiv.
Vozila na ravni 3 imajo zmožnosti „zaznavanja okolja“ in lahko sama sprejemajo premišljene odločitve, kot je na primer pospeševanje mimo počasi vozečega vozila. Še vedno pa jih mora upravljati človek. Voznik mora ostati pozoren in pripravljen prevzeti nadzor, če sistem ne more izvesti naloge.
Pred skoraj dvema letoma je Audi (Volkswagen) napovedal, da bo naslednja generacija modela A8 – njihove vodilne limuzine – prvo serijsko vozilo stopnje 3 na svetu. In to so tudi uresničili. Audi 2019 A8L prihaja v komercialne prodajne salone to jesen. Opremljen je s sistemom Traffic Jam Pilot, ki združuje lidarski skener z naprednim združevanjem senzorjev in procesno močjo (ter vgrajenimi redundancami, če bi katera od komponent odpovedala).
L4: Visoko avtomatizirana vožnja: Ključna razlika med avtomatizacijo 3. in 4. stopnje je v tem, da lahko vozila 4. stopnje posredujejo, če gredo stvari narobe ali pride do napake v sistemu. V tem smislu ti avtomobili v večini okoliščin ne potrebujejo človeške interakcije. Vendar ima človek še vedno možnost, da ročno prekliče delovanje.
Vozila 4. stopnje lahko delujejo v načinu samovozečega vozila. Dokler se zakonodaja in infrastruktura ne razvijeta, pa lahko to počnejo le na omejenem območju (običajno v urbanem okolju, kjer najvišja hitrost v povprečju doseže 30 km/h). To je znano kot geografsko omejevanje. Zato je večina obstoječih vozil četrte stopnje namenjena souporabi vozil.
L5: Polno avtomatizirana vožnja: Vozila stopnje 5 ne zahtevajo človeške pozornosti – „dinamična naloga vožnje“ je odpravljena. Avtomobili 5. stopnje ne bodo imeli niti volana ali pedal za pospeševanje/zaviranje. Ne bodo imeli geografskih ograj, lahko bodo šli kamor koli in počeli vse, kar lahko počne izkušen človeški voznik. Popolnoma avtonomni avtomobili se preizkušajo v več delih sveta, vendar še nobeden ni na voljo širši javnosti.
{kind=link}