
UM FERI
Avtor: Primož Kosi
Razvoj in avtomatizacija opravil tako v industriji kot v prostočasnih dejavnostih in domačih opravilih, vključuje vedno več električnih pogonov, ki jih je potrebno bolj ali manj natančno krmiliti.
Vedno bolj so uveljavljeni brezkrtačni motorji, ki so tišji, se manj segrevajo in imajo bolj natančno delovanje. Z vektorskim krmiljenjem motorjev lahko še dodatno izboljšamo izkoristek, še posebej pri višjih vrtljajih. Zaradi večjega izkoristka imajo motorji manj termičnih izgub in se posledično manj segrevajo. S sodobnimi načini krmiljenja in naprednimi krmilnimi algoritmi se lahko pozicija rotorja natančneje določi in s tem je tudi delovanje motorja natančnejše in primerno za specifične aplikacije, kjer je natančnost ključnega pomena. Vektorsko vodenje BLDC (Brushless DC) motorjev ima kompleksnejšo izvedbo, zato je razvoj temu primerno tudi dražji in primeren zgolj za zahtevnejše aplikacije, ki lahko opravičijo višje stroške sistema.
Osnovne značilnosti in prednosti
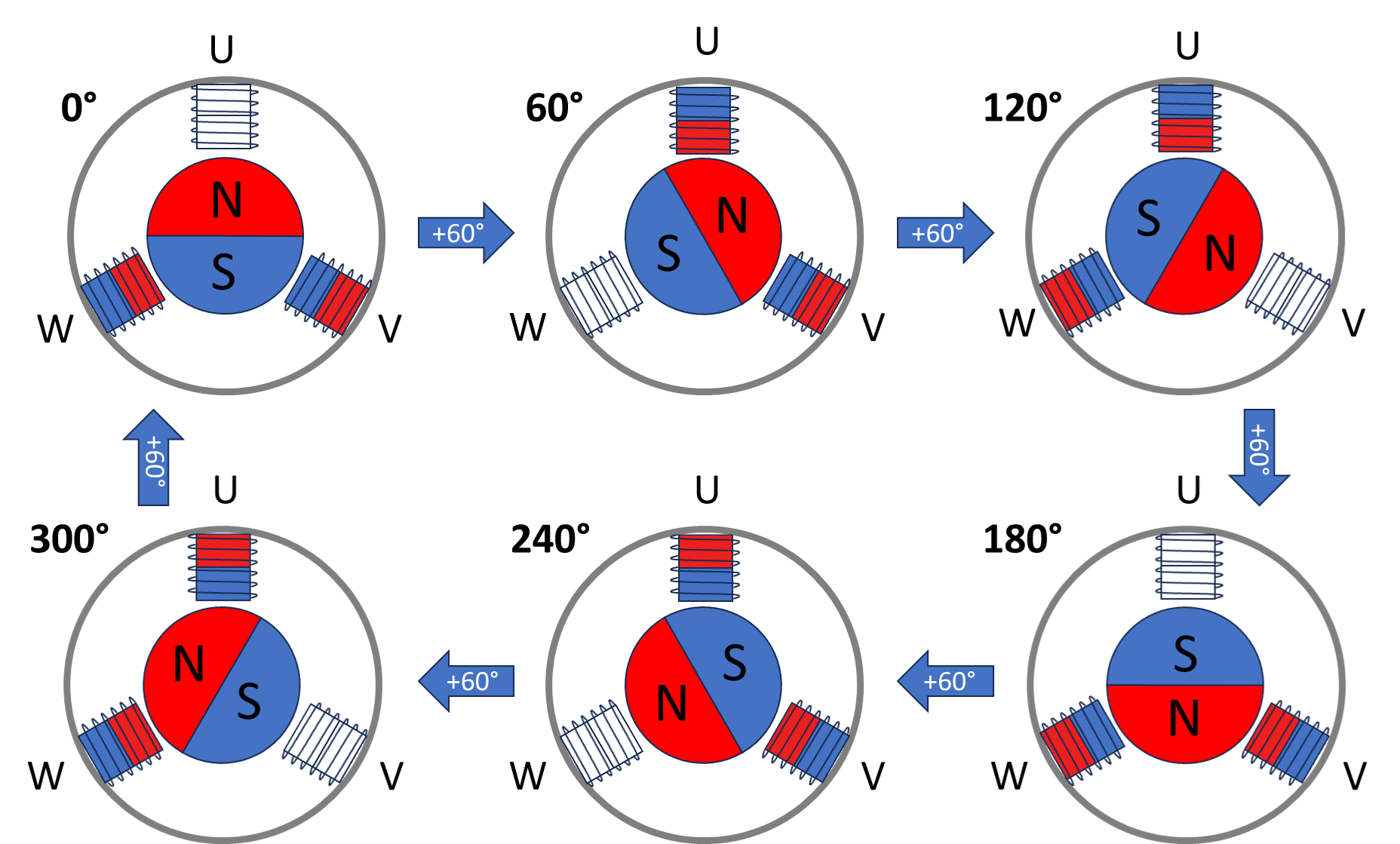
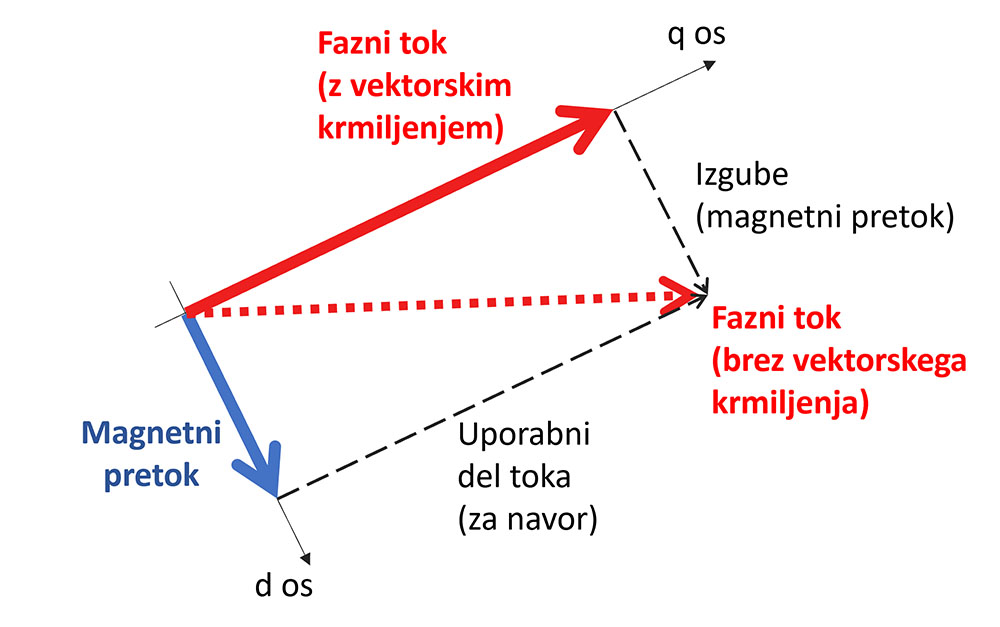
Vektorska regulacija je napredna matematična metoda za krmiljenje trifaznih enosmernih motorjev. Sistem je zgrajen s povratno vezavo, preko katere se prepoznava trenutna pozicija rotorja in meri trenutne fazne tokove. Za regulacijo je potrebno poznati pozicijo rotorja oziroma trajnega magneta in magnetno polje, ki nastane zaradi tokov skozi tuljave elektromagnetov. Elektromagneti se pri BLDC motorjih nahajajo na statorju, zato ni potreben prenos električne energije na rotor in s tem je odpravljena potreba po ščetkah. Vektorska regulacija je ena izmed metod ustvarjanja vrtilnega magnetnega polja z elektromagneti na statorju. S spreminjanjem toka v navitjih spreminjamo smer vektorja magnetnega polja in posledično navor motorja(Slika 1). Navor ustvarja samo pravokotna sila glede na pozicijo trajnega magneta v rotorju. Statorski tok lahko razdelimo na dve komponenti in opišemo z ortogonalnima vektorjema. Ena komponenta je pravokotna na smer magnetnega polja rotorja in predstavlja navor, druga komponenta, ki je vzporedna s smerjo magnetnega polja rotorja, pa predstavlja magnetni pretok (Slika 2). Cilj krmiljenja je povečati navor in zmanjšati njegovo ortogonalno komponento – magnetni pretok.
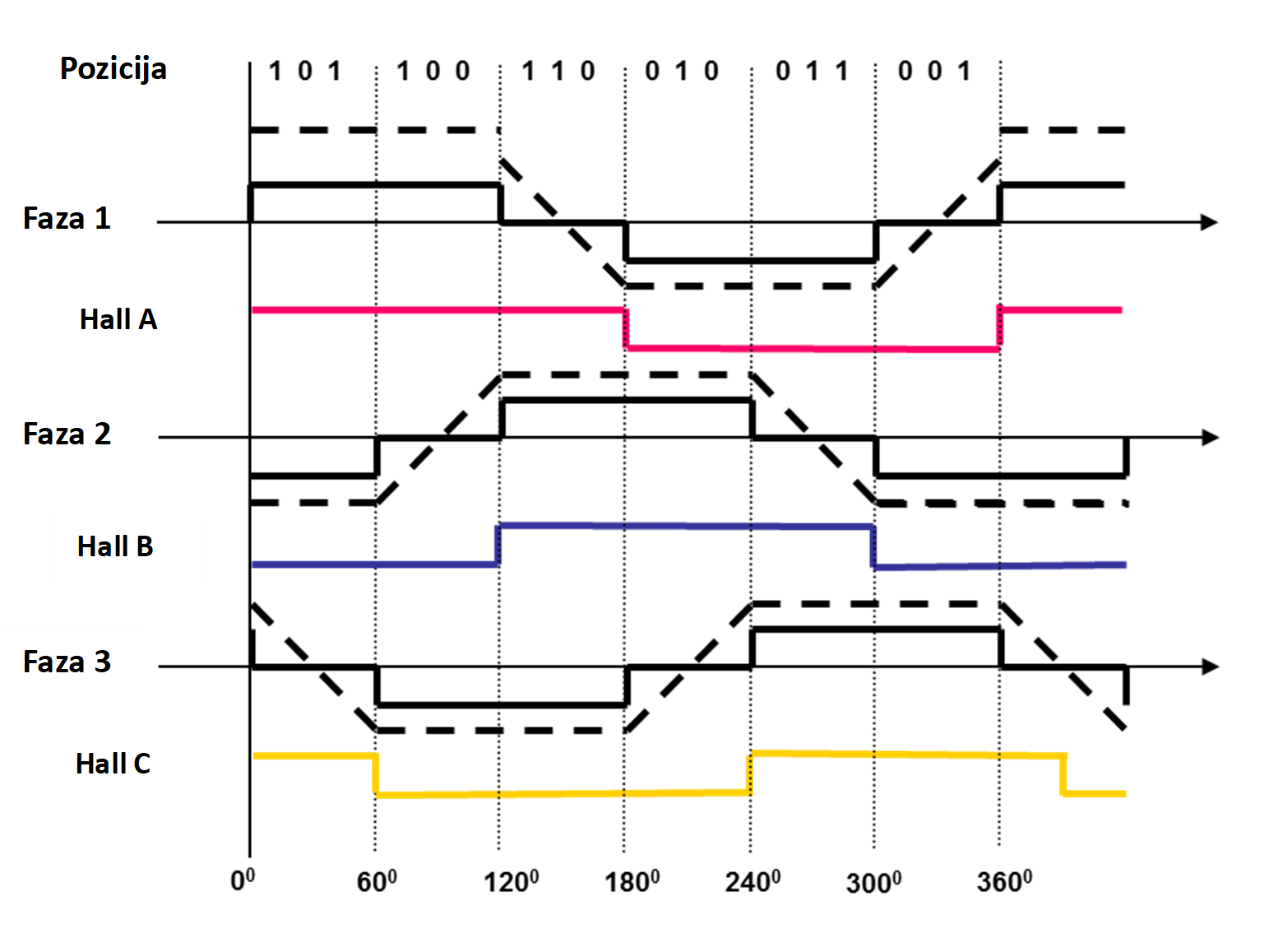
Poznamo tudi enostavnejše metode regulacij, kot je vodenje s pomočjo Hallovih senzorjev, ki imajo slabši izkoristek zaradi manjšega števila prepoznanih pozicij rotorja in predvsem oblike toka, ki se spreminja po naprej določenem vzorcu (pravokotna oblika, trapezoidna oblika, ipd.). S tem lahko vplivamo le na hitrost vrtenja, ne pa na navor. Kot med komponento toka, ki predstavlja navor, in vektorjem magnetnega polja rotorja mora biti 90°, da dosežemo največji izkoristek. Pri krmiljenju s pomočjo Hallovih senzorjev se omenjeni kot s pravilnim krmiljenjem spreminja med 60° in 120°, kar povzroča nihanje navora. Razlog za spreminjanje kota je omejeno število pozicij, ki jih lahko prepoznamo (Slika 3). Na sliki 3 je prikazan primer regulacije s trapezoidnim spreminjanjem faznih tokov.
Princip delovanja
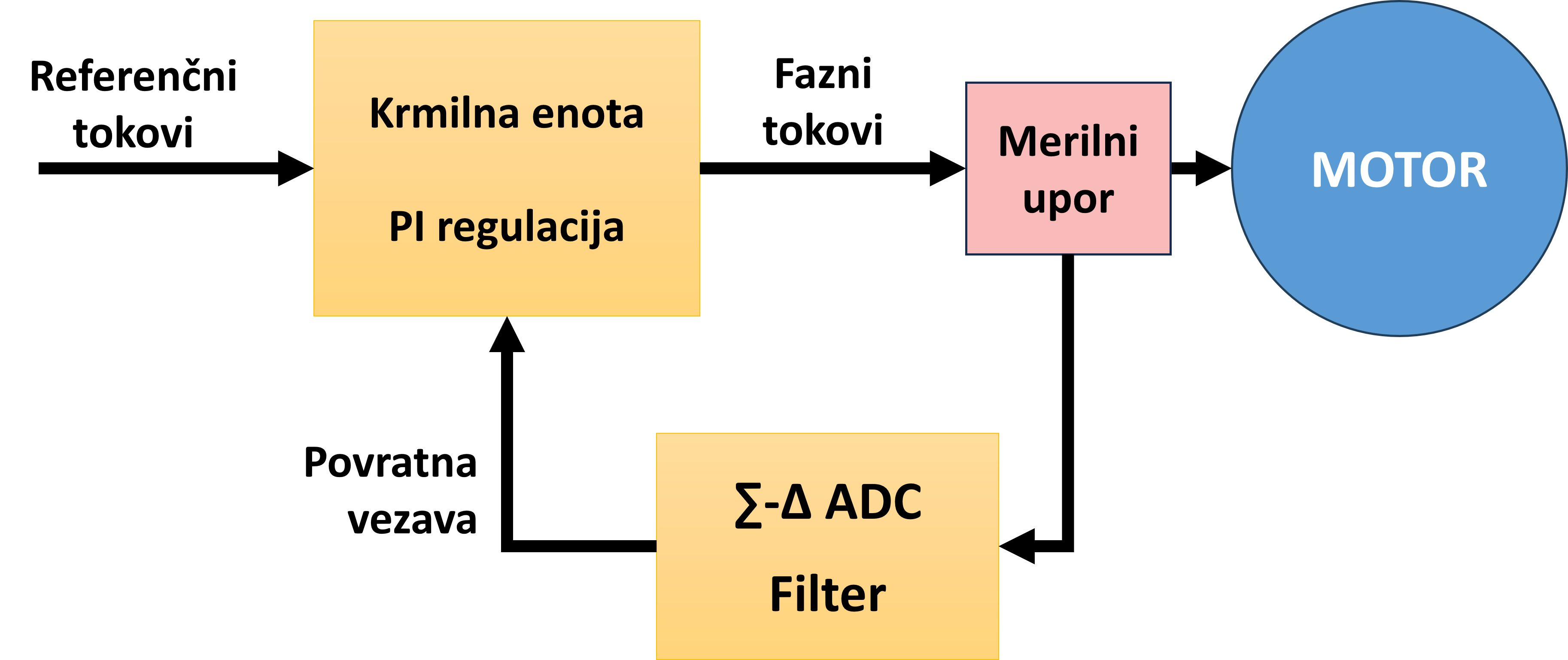
Glavna značilnost sistema je merjenje tokov v posameznih fazah, ki jih preko povratne zanke primerjamo z referenčnimi vrednostmi in glede na razliko spreminjamo krmilne signale. Tokovi se lahko merijo na več načinov. Natančneje bo opisana metoda z merilnim uporom in sigma-delta analogno digitalnim pretvornikom. Zaradi načina delovanja pretvornika je potrebno izhod še filtrirati (Slika 4).
Meritve treh faz motorja je treba predstaviti z dvema pravokotnima vektorjema, q in d. Pri krmiljenju elektromotorjev se za to pogosto uporabljata Clarke in Park transformaciji. Clarke transformacija pretvori tri fazne tokove iz časovne domene abc v statično domeno ortogonalnih vektorjev α in β. Tako se predstavitev tokov iz treh zmanjša na predstavitev z dvema vektorjema, ki se sinusno spreminjata. Park transformacija pretvori statična vektorja α in β v rotirajoča se vektorja d in q. Vrtilna hitrost vektorjev je enaka vrtilni hitrosti motorja, zato sta vrednosti vektorjev d in q konstantni. Transformaciji sta predstavljeni na spodnji sliki (Slika 5).
Vektorska kontrola je sestavljena iz dveh PID regulatorjev za rotirajoči pravokotni komponenti toka d in q. Z enim reguliramo vektor statorskega toka (vektor q), ki ustvarja magnetno polje pravokotno na pozicijo rotorja oziroma navor motorja, z drugim pa magnetni pretok (vektor d). Regulacija poteka glede na trenutno pozicijo motorja, zato je potreben Hallov senzor, za določanje absolutne pozicije rotorja. Navor lahko tako določimo iz razlike pozicij rotorja in magnetnega polja statorja. Za največji izkoristek je potrebno komponento magnetnega pretoka d zmanjšati na 0, tokovno komponento q pa prilagajamo glede na želen navor (Slika 2).
Merjenje toka z uporabo sigma-delta ADC-ja
Vektorska regulacija temelji na spreminjanju toka statorskih elektromagnetov, s katerimi se ustvarja vrtilno magnetno polje. Dejanski tok je potrebno izmeriti in ga primerjati z danimi zahtevami. Za merjenje toka se uporablja več metod. V nadaljevanju bo natančneje predstavljen način merjenja z merilnimi upori v kombinaciji s sigma-delta ADC (analogno digitalnega pretvornika). Metoda je primerna za visoko natančne in učinkovite sisteme. Hkrati je izvedena tudi galvanska ločitev krmilnega sistema in motorja. Pri uporabi AD pretvornika je potrebno dodati še demodulacijo v obliki filtra. S primernim filtrom in decimacijo lahko pri visoki frekvenci vzorčenja dosežemo visoko natančnost sistema. Tipično se uporabljajo FIR filtri kot na primer sinc filter tretjega reda.
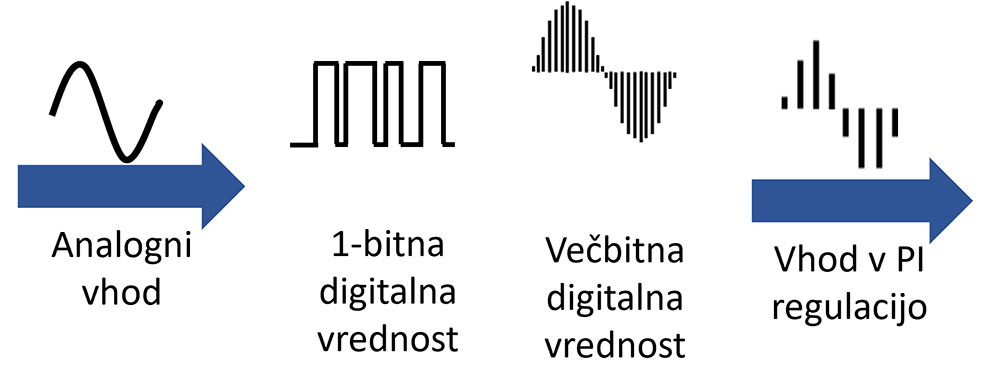
Ko motor krmilimo s preklapljanjem enosmerne napetosti, lahko tok predstavimo z dvema komponentama, povprečno vrednostjo in nihanjem okoli nje. Za krmiljenje je pomembna samo povprečna vrednost. Najpreprostejši način določanja povprečne vrednosti je vzorčenje signala na začetku in v sredini periode, ko je vrednost enaka povprečni vrednosti. Težava, ki se lahko pojavi pri slabi sinhronizaciji vzorčenja je odmik dejanske vrednosti. To se zgodi, če perioda vzorčenja ni popolnoma enaka periodi signala, saj se takrat ne vzorči v točkah povprečne vrednosti. Za tak način so primerna sample-and-hold vezja (vzorči in zadrži), ki vrednost zajamejo in jo do naslednjega pulza vzorčenja zadržijo. Pri sigma-delta pretvornikih se signal vzorči ves čas, zato je potreben drugačen pristop iskanja povprečne vrednosti. Izhodni podatek pretvornika je le eno-bitna vrednost, zato je za meritve potreben časovni interval. Postopek pretvorbe je zahtevnejši in je sestavljen iz več elementov. Najprej se signal pretvori v 1-bitni podatek s pomočjo sigma-delta analogno digitalnega pretvornika. Zaporedje izhodnih bitov je potrebno demodulirati (filtrirati in decimirati). Signal se najprej filtrira in na izhodu dobimo večbitne vzorce signala. Nato je potrebna še decimacija, ki zmanjša število vzorcev, da dobimo primerno resolucijo za obdelavo. S pomočjo sinc filtra se postopek demodulacije izvede v enem koraku. Filter se lahko izvede s pomočjo strojnega jezika na FPGA vezjih ali programsko na mikroprocesorju.

Za dobro regulacijo so pomembne časovne zakasnitve, ki so del vsake povratne vezave. Visoka frekvenca vzorčenja sigma-delta pretvornika v sistemu ustvari zanemarljivo majhen časovni zamik. Nasprotno velja za filter, ki s svojim delovanjem povzroča časovni zamik. Impulzni odziv filtra kaže, da izhod ni odvisen samo od trenutnega vhoda ampak tudi od prejšnjih vhodov in izhoda. Izhod filtra je vsota omenjenih vrednosti z različnimi utežmi. Pri sinc filtru imajo vrednosti v sredini vzorčne sekvence največje uteži, kar je potrebno upoštevati pri sinhronizaciji vzorčenja s signalom. Kot že omenjeno, pomembna je samo povprečna komponenta toka, ki jo lahko vzorčimo na začetku in v sredini periode, ko je vrednost izmenične komponente enaka 0. Izmenična komponenta toka je simetrična okrog povprečne vrednosti. Potrebno je uskladiti sredino vzorčne sekvence z začetkom in sredino periode vzorčnega signala. Pri takem vzorčenju bo pred točko povprečne vrednosti in po njej enako število vzorcev. Če upoštevamo, da je izmenična komponenta okrog te točke simetrična, se bo izmenična komponenta odštela, rezultat pa bo povprečna vrednost toka. Z dobro sinhronizacijo vzorčenja preprečimo lezenje merjene vrednosti.
Za dobro sinhronizacijo je potrebno definirati primerno dolžino impulznega odziva. Z dolžino odziva je znan čas, da vzorčen podatek dobimo na izhodu filtra. Impulzni odzivi se ne smejo prekrivati. V času ene periode izmenične komponente toka signal dvakrat doseže vrednost 0. Ker je potrebno tok meriti v točki, ko le ta doseže povprečno vrednost, se izvedeta dve sekvenci vzorčenja, zato mora biti čas dveh sekvenc vzorčenja manjši od ene periode izmenične komponente toka.
PID regulacija
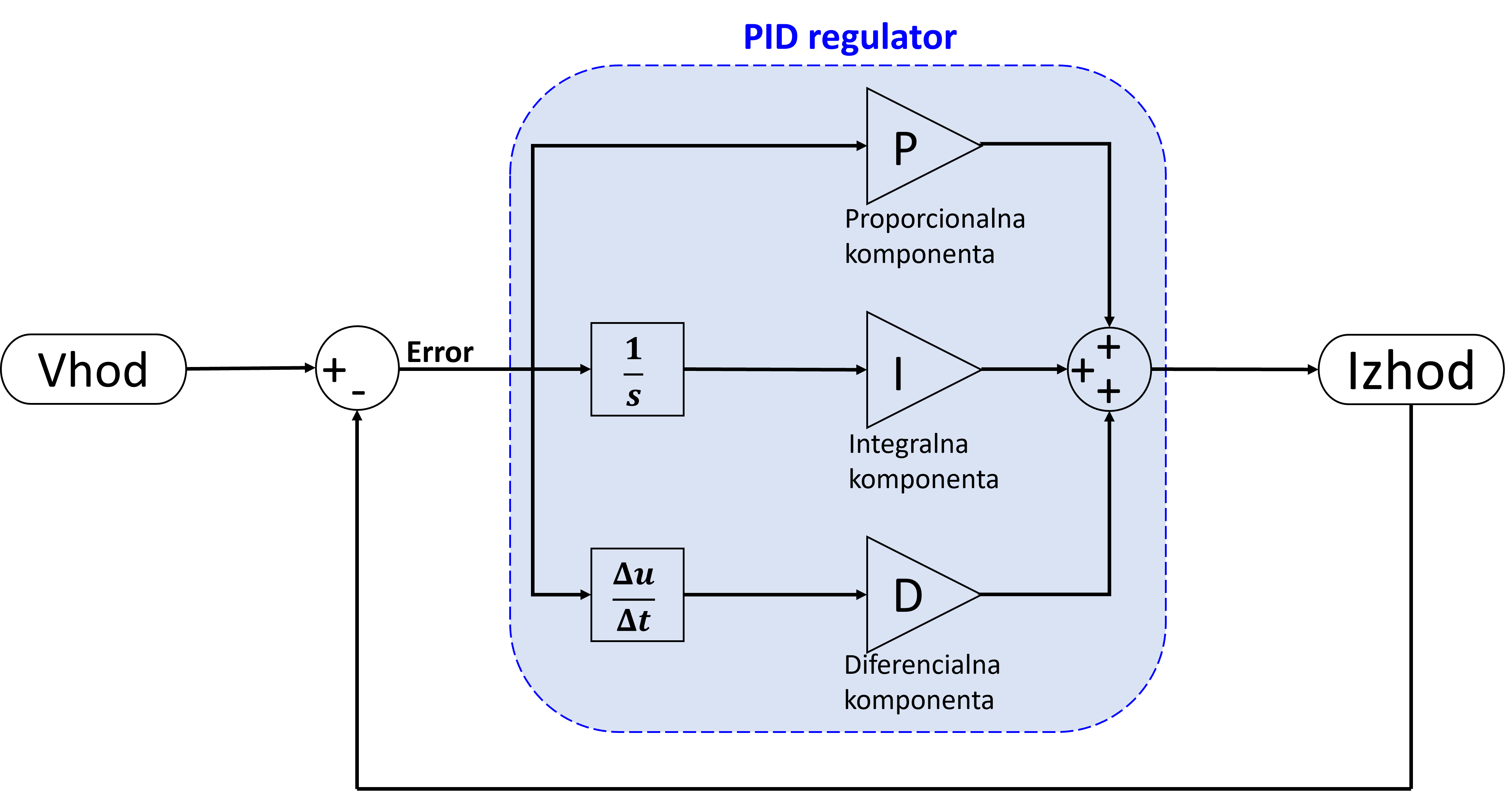
Vhodni tok je potrebno čim bolj približati željenim vrednostim. PID regulatorji so eni najbolj uporabljenih regulacijskih metod na različnih področjih. Njihovo delovanje je robustno, izvedba pa preprosta. Vsaka regulacija predstavlja nov problem za načrtovalca, saj so za PID regulator potrebne specifične nastavitve za vsak sistem posebej. Z nastavitvami regulatorja vplivamo na hitrost odziva, prenihaj, dolžino prehodnega pojava, kakšne posledice prinašajo zunanji dejavniki in podobno. Sestavljeni so iz treh komponent: proporcionalne, integralne in diferencialne. Pri iskanju najboljšega odziva se nastavljajo uteži posameznih komponent P, I in D. Njihovi vplivi se na koncu seštejejo (Slika 7).Večina PID regulatorjev je sestavljenih samo iz komponente P. Omejeni smo z linearnostjo sistema, saj s PID regulatorji lahko upravljamo samo linearne sisteme. Pri kompleksnejših sistemih je najprej potrebna linearizacija sistema.
Nastavitev pravilnih uteži se začne s proporcionalno komponento, ki jo povečujemo, dokler je sistem stabilen. S povečevanjem dosežemo večjo strmino in s tem hitrejše sledenje na izhodu regulacijske zanke. Z mejo stabilnosti dosežemo največjo vrednost uteži komponenteP, ki jo nato zmanjšamo na polovico njene vrednosti. Sledi nastavitev integralne komponente. S povečevanjem komponenteI manjšamo statično napako med referenčno vrednostjo in reguliranim izhodom. Če je utež prevelika, lahko pride do velikega prenihaja in posledično še oscilacij, saj integracijska komponenta prišteva napako že na začetku, ko je razlika med signaloma lahko velika. Diferencialna komponenta lahko zmanjša prenihaje, vendar je zelo občutljiva na motnje, zato se po navadi ne uporablja. Oscilacije se poskušajo zmanjševati z izboljšavami v samem sistemu.
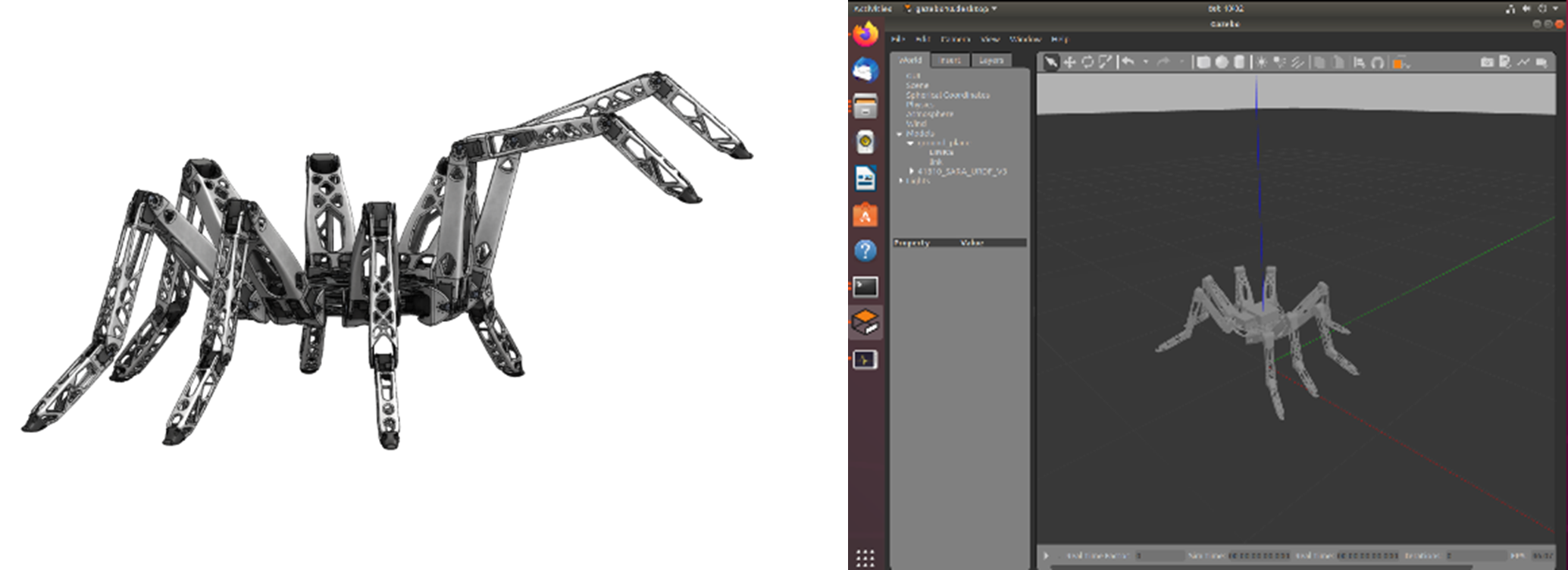
Krmiljenje elektromotorjev za vesoljske aplikacije – SARA (Slovenian Arachnid Robot Adventurer
V laboratoriju za elektronske in informacijske sisteme (LEIS) v sodelovanju s podjetjem Sky Labsin Domel razvijamo prvega slovenskega vesoljskega robota SARA. Podjetje SkyLabs kot primarni izvajalec izvaja krovni razvoj platforme SARA, v sodelovanju s podjetjem Domel pa se izvaja razvoj pogonskih sklopov. Eden ključnih elementov bodo elektromotorji za premikanje. Za njihovo delovanje se razvija zgoraj opisana vektorska regulacija. Robot z nogami odpravi veliko težav konceptov s kolesi, še posebej na področju vesoljskih raziskav planetov in lun, pri katerih so kolesni sistemi pogosto ključen faktor odpovedi misij. Prilagodljiv je za različne znanstvene aplikacije raziskovanja in predstavlja tehnološko rešitev za nadaljnje znanstvenoraziskovalne misije. SARA s svojimi 32 prostorskimi stopnjami zagotavlja prilagajanje različnim terenom, kar omogoči visoko stopnjo avtonomije pri raziskovanju. Za simulacijo realnega fizikalnega okolja in interakcijo celovite kinematike SARA se uporablja simulacijsko okolje Gazebo, ki omogoča testiranje zmogljivosti, algoritmov koordinacije, navigacije in nadzora na različnih vrstah naključno ustvarjenih ali resničnih pokrajin.Laboratorij se sicer lahko pohvali z izdelavo in uspešnim delovanjemdveh slovenskih nanosatelitov TRISAT in TRISAT-R v vesolju. Poleg vesoljskih tehnologij pa se laboratorij ukvarja še s tehnologijami na področjih vgrajenih sistemom, brezžične komunikacije, mikroelektronike, mikrobiologije in biokemije.
Viri:
- GOODWIN, Damond. Field-oriented Control (Vector Control) for Brushless DC Motors. Control Automation, 19. marec, 2023, (https://control.com/technical-articles/field-oriented-control-vector-control-for-brushless-dc-motors/ 26.2.2024).
- SORENSEN, Jens. Sigma Delta Conversion Used for Motor Control. Analog Devices, 1. avgust, 2015, (https://www.analog.com/en/resources/technical-articles/sigma-delta-conversion-used-for-motor-control.html 26.2.2024).
- BAERT, Matthais. How to tune a PID controller. Marple, (https://www.marpledata.com/blog/how-to-tune-a-pid-controller 26.2.2024).
- SORENSEN, Jens, O’SULLIVAN, Dara, O’MEARA, Shane. Part 1: Optimized Sigma-Delta Modulated Current Measurement for Motor Control. Analog Devices, Vol 53, No 4, oktober, 2019, (https://www.analog.com/media/en/analog-dialogue/volume-53/number-4/optimized-sigma-delta-modulated-current-measurement-for-motor-control.pdf 26.2.2024).
- SORENSEN, Jens, O’MEARA, Shane, O’SULLIVAN, Dara. Part 2: Optimized Sigma-Delta Modulated Current Measurement for Motor Control. Analog Devices, Vol 53, No 4, november, 2019, (https://www.analog.com/media/en/analog-dialogue/volume-53/number-4/optimized-sigma-delta-modulated-current-measurement-for-motor-control-part-2.pdf 26.2.2024).
{kind=link}