Osnovno učilo v specializirani učilnici za novo mehatroniko je sestavljeno iz kartičnega računalnik(vir:1), modula s tipkami(vir:2) in krmilnika z led in priklopom na koračni motor(vir:3). Poleg rabimo še tipkovnico, miško, monitor in napajalnik.

Povezovalni Arduino kabli (vir:5), instalaterske vezice, navadna deska (80x40x400) in pištola na vročo plastiko omogoča dinamično dodajanje drugih modulov, ki so tudi uporabljani v slovenski izdaji (vir:6). V praksi delujemo brezpapirno, z zelo malo porabo energije in poceni. Uporaba MSteams-ov, spletnih strani, na katere se prijavljamo z Google računom, povezljivost preko brezžičnega omrežja, omogoča preglednost, poenostavitev in lažje razumevanje snovi. Kartični računalnik se je pokazal kot enakovreden delovni postaji. Zaradi vgrajenega GPIO priključka je to podlaga za demonstracijo različnih tehnologij spleta , strežnikov in programskih jezikov. Sledimo načelu delujočih primerov, ki so razporejeni po tehnologijah in vsebinah. Učenci nato zaženejo primer, opravijo meritve in izdelajo poročila. Naj boljši poizkusijo napisat svoj program.
Ta vsebina je samo za naročnike

Kapacitivne tipke se ob vklopu nastavijo glede na debelino materiala iz katerega izdelamo ohišje. Proizvajalec dovoljuje les, plastiko ali steklo do debeline 5mm. Modul ima CE oznako. Napajalna napetost je 2V do 5,5V. Poraba pri polnem obratovanju je 12uA. Modul ima priključke VCC, GND, OUT1, OUT2, OUT3 in OUT4. Uporaba in priklop sta enostavna. Dolgotrajna uporaba na odprtem učilu mu ne škodi, kar kaže na robustnost in odlično notranjo zaščito. Vsak izhod ima LED-ico, ki signalizira stanje izhoda.
V IDE (Integrated Development Enviroment) za C si poglejmo opis priključkov za BCH (fizični pini na procesorju), oznake GPIO priključka, in viringPI označevanja). Na kartičnem računalniku imamo poleg napajanja VCC, 3,3v in mase GND še 32 GPIO pinov, kar so štirje bajti. Nekateri pini imajo določene funkcije, nekatere lahko poljubno uporabimo.

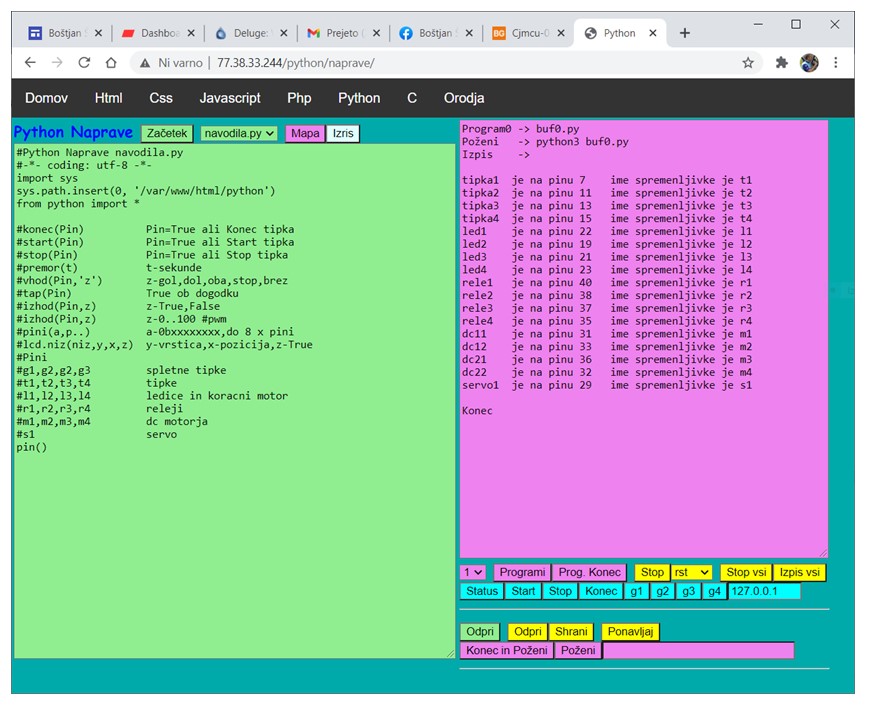
Slovenska izdaja (Vir:6) zaradi lažjega razumevanja in pisanja programov v različnih tehnologijah, dodeli funkcije prostim GPIO pinom. Danes nas zanimajo dodeljene funkcije tipka1, tipka2, tipka3, tipka4 , led1, led2, led3 in led4. V tabeli poleg imen dodeljenih funkcij vidim ime spremenljivke in dodeljen pin.
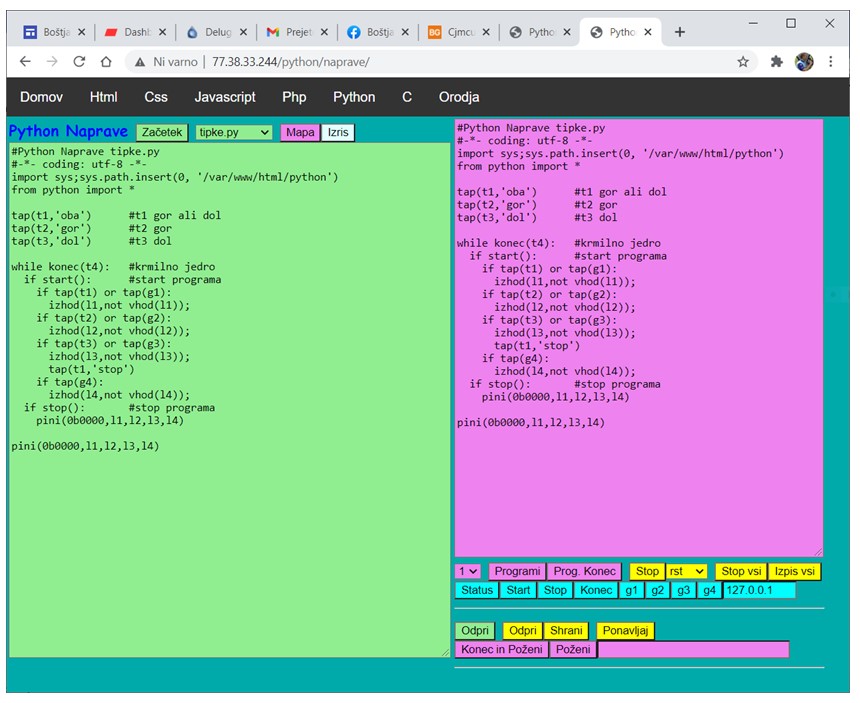
Krmilno jedro izkorišča dogodek pritisk na tipko (pritisk, spust, ali oboje). Pravilno nastavljena funkcija tap() vrne ob dogodku vrednost true, drugače je false. Znotraj jedra z uporabo odločitvenega stavka opišemo naše zahteve. V našem primeru se zamenja stanje ustrezne LED-ice. Če LED-ica gori se ugasne in če je ugasnjena se prižge. Napišem naj, da funkcija z uporabo spremenljivke g1, g2, g3 ali g3 reagira na tap spletnega gumba g1, g2, g3 ali g4.
Krmilnik za koračni motor ima signalne LED-ice. Napajanje je VCC in GND. Imamo 4 vhode IN1, IN2, IN3 in IN4. Slovenska izdaja uporablja spremenljivke l1, l2, l3 in l4. Na modulu imamo ULN2003 krmilnik, ki ga lahko uporabimo za izhodne tranzistorje (500mA, 12V). Na modulu imamo izhodni priključek, ki ga uporabimo za priklop porabnikov. Priklopimo lahko do 4 porabnike. V praksi lahko priklopimo DC motor, ki ga lahko krmilimo samo v eno stran, priklapljamo lahko LED trakove ali koračni motorček. LED-ice so okrogle 3mm, zelo svetle. Če pogledate na pine kamor priključimo VCC (+) in GND (-) imamo mostiček. Če ga odstranimo, lahko priklopimo 12V (+). Z vsakim tranzistorjem lahko krmilimo kar 6W moči, kar zadostuje za večino šolskih poskusov. Vezava krmilnika kaže dobro ščitenje z diodami. Pri krmiljenju induktivnega bremena, je zaščita potrebna. Zenerjeva dioda proti masi (COM) ščiti izhod pred napetostnimi špicami. Modul se v praksi obnaša kompaktno in je težko uničljiv.

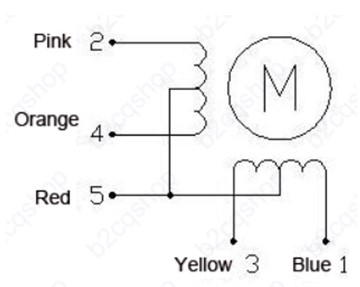
Posebej za 4 izhodne tranzistorje so razvili 4 fazne koračne motorčke. Gre za izogibanje nenormalno dragim H-krmilnikom, ki so potrebni za krmiljenje 2 faznih koračnih motorjev. Navitje 2 faznih koračnih motorjev so spremenili s srednjim odcepom. Srednji odcep priključimo na VCC (+), oba konca navitja pa na tranzistorski izhod proti GND (-).
Gre za 5 žilni priklop. Glavna prednost je možnost uporabe krmilnikov s tranzistorskimi izhodi. Pri ožičenju oba srednja izhoda (rdeč vodnik) povežemo na pozitivno napajalno napetost. Za krmiljenje magnetnega polja v levo ali desno uporabimo odprtje levega ali desnega tranzistorja. 4 fazni koračni motorji imajo za malenkost manj moči. Za priklop rabimo 5 vodnikov. Krmilniki so enostavni in poceni. Opisani komplet koračni motor z ustreznim krmilnikom (ki ga lahko uporabljamo kot LED) in reduktorjem je poceni in povsem primeren za delo v šoli. Zaradi vgrajenega reduktorja se os vrti počasi in ima zadosti momenta za obračanje težjih bremen. Krmiljenje koračnega motorja je brez povratne zanke, zato moramo biti v premik sigurni. Tipični sistemi z uporabo koračnega motorja se najprej nastavi v začetno točko in nato opravlja premike, lahko ure in ure, kjer imamo nadzor samo nad relativnimi premiki. Priklopimo lahko poljubno število koračnih motorjev. Programske primitive zahtevajo vse štiri krmilne pine (v našem primeru l1, l2l l3 in l4) in potem samo ukažemo, za koliko korakov se motor zavrti v levo ali desno. Nadziramo lahko tudi hitrost zasuka, nimamo pa podatka o dejanskem zasuku. V slovenski izdaji je vse skupaj preizkušeno in odprto. Vsi programi in projekti so namenjeni poučevanju. Kakšno zaporedje ukazov krmilniku moramo zagotoviti in kako to dosežemo, se odlično predava na delujočih primerih. Dijak se prepriča kaj se zgodi, če poizkusimo motor zavrteti prehitro. Delujoči enostavni primeri so dobra osnova za iskanje novih idej s tehnologijami, ki se jih učimo. Poudarek je na učenju z delujočimi primeri.


Minimalno učilo je tipka in LED-ica. Večina nas je začela s priklopom led in tipke na pin mikrokontrolerja. Potem smo napisali kodo(v mojem času v zbirnem jeziku), ki je na pritisk tipke prižgala ali ugasnila LED-ico. Takšni so romantični začetki. Tudi občutki ob prvem delujočem programu so bili podobni, romantični, sanjaški, preplavljeni smo bili z adrenalinom in ideje so prehitevale vse okoli nas.
Modul s kapacitivnimi tipkami ima čudovito lastnost, da lahko stanje tipke vsiliš, če vhodni pin na GPIO vhodu kartičnega računalnika spremeniš v izhod. V tem primeru velja stanje izhodnega GPIO pina in to stanje signalizira ustrezna LED-ica. Za prve poskuse imamo s tem modulom poljubno kombinacijo tipk ali LED-ic za števila do 4. Priklopimo modul na 4 GPIO pine in potem programsko določimo ali želimo tipko ali LED-ico.
Ponovno sem oživil C. Napisana je osnovna meritvena vaja (Vir:7). Na vidiku je hitro krmilno jedro, ki čase cikla potiska za 100 krat nižje. Lahko si ogledate, kako dosežemo cikel okoli 140nS za krajši efekt z LED. V realnih projektih se navadno vrtita dve jedri hitrejše in počasnejše. Ampak samo če rabimo tako hitrost. Spremljajte nas in pazite na fizično kondicijo v teh korona časih. Okoli krmilnega jedra, bomo morali povedati veliko. Gre za nov termin, in se pojavlja v modernih krmilnih sistemih, kjer združujemo krmilja s klasičnimi operacijskimi sistemi. V bistvu gre za veliko poenostavitev
- https://www.galagomarket.com/item/display/1862/5377_raspberry-pi_raspberry-pi_raspberry-pi-4-model-b,-2gb
- https://www.banggood.com/CJMCU-0401-4-bit-Button-Capacitive-Touch-Proximity-Sensor-Module-With-Self-locking-Function-p-1118016.html
- https://www.banggood.com/28YBJ-48-DC-5V-4-Phase-5-Wire-Stepper-Motor-With-ULN2003-Driver-Board-p-74397.html
- https://www.galagomarket.com/item/display/1864
- https://www.banggood.com/40pcs-20cm-Female-to-Female-Jumper-Cable-Dupont-Wire-p-75612.html
- http://77.38.33.244/
- http://77.38.33.244/c/gpio/
Avtor: Boštjan Šuhel
{kind=link}