 Digi-Key Electronics
Digi-Key Electronics
Avtor: Rich Miron
2020_284_32
Sestavni del številnih industrijskih proizvodnih obratov so motorji na enosmerni tok brezkrtačni (BLDC) za uporabo predvsem v primerih, ki vključujejo servo pogon, zaganjanje, pozicioniranje in spremenljive hitrosti. V teh primerih uporabe sta ključnega pomena natančen nadzor gibanja in stabilno delovanje. Ker BLDC motorji delujejo po načelu gibajočega se magnetnega polja za ustvarjanje navora motorja, je pri načrtovanju industrijskega BLDC sistema glavni izziv na področju nadzora natančno merjenje navora in hitrosti motorja.
Za zajemanje navora BLDC motorja je treba dva od treh induktivnih faznih tokov hkrati meriti z večkanalnim analogno-digitalnim pretvornikom (ADC) za istočasno vzorčenje. Mikrokontroler z ustreznimi algoritmi izračuna tretji trenutni fazni tok. S tem postopkom se ustvari natančen in trenuten posnetek stanja motorja, kar je pomemben korak pri razvoju zelo natančnega, robustnega sistema za nadzor navora motorja.
V tem članku so na kratko opisana vprašanja, povezana z zagotavljanjem natančnega nadzora navora, vključno s stroškovno učinkovitimi sredstvi za uvedbo zahtevanega vzporednega upora. Sledi predstavitev natančnega diferenčnega ojačevalnikaAD8479 in analogno-digitalnega pretvornika z registrom zaporednega približevanja za dvojno vzorčenje (SAR-ADC) AD7380 (Analog Devices), ter prikaz njune uporabe za opravljanje natančnih faznih meritev za načrtovanje robustnega sistema.
Kako delujejo BLDC motorji
BLDC motor je sinhroni motor s trajnim magnetom z valovno obliko povratne elektromagnetne sile (EMF). Povratna elektromagnetna sila (EMF) na zadevnem priključku ni stalna, temveč se spreminja tako z navorom kot s hitrostjo rotorja. Čeprav enosmerni napetostni vir neposredno ne poganja BLDC motorja, je osnovno načelo delovanja BLDC podobno kot pri motorju na enosmerni tok. BLDC motor ima rotor s trajnimi magneti in stator z induktivnimi navitji. Ta tip motorja je v osnovi navzven obrnjen motor na enosmerni tok z odstranjenimi ščetkami in komutatorjem, pri čemer so navitja povezana neposredno s krmilno elektroniko. Krmilna elektronika nadomesti funkcijo komutatorja in oskrbuje navitja z električno energijo v pravilnem zaporedju za zahtevano gibanje. Z električno energijo oskrbovana navitja se vrtijo okoli statorja po sinhroniziranem, uravnoteženem vzorcu. Napajano navitje statorja usmerja magnet rotorja in preklopi ravno v trenutku, ko je rotor poravnan s statorjem.
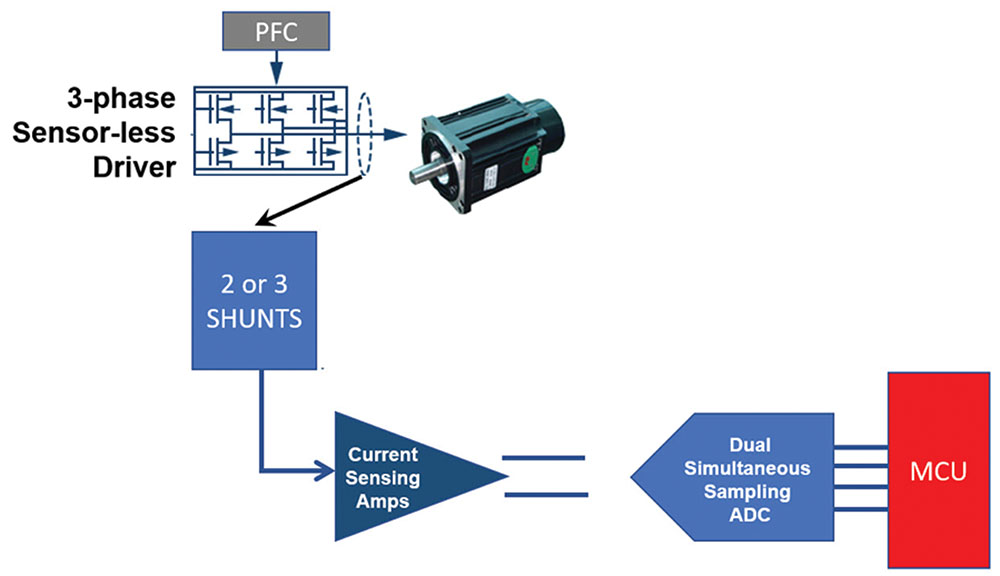
Sistem BLDC motorja zahteva trifazni gonilnik BLDC motorja brez senzorjev, ki ustvarja tokove v treh navitjih motorja (slika 1). Vezje se napaja prek stopnje digitalnega faktorja povečanja moči (PFC) z nadzorom vhodnega toka, ki zagotavlja stabilno moč za trifazni gonilnik brez senzorjev.
Trije vzbujevalni tokovi poganjajo BLDC motor, pri čemer vsak napaja in ustvarja faze v navitjih z različnimi fazami, ki skupaj tvorijo 360°. Različne fazne vrednosti so pomembne: ko vzbujanje treh krakov tvori skupno 360°, se enakomerno uravnotežijo na 360° (npr. 90° + 150° + 120°).
Tok v vseh treh navitjih sistema mora biti v vsakem trenutku znan. V uravnoteženem sistemu se to doseže tako, da se izmerita tokova samo dveh od treh navitij. Tretje navitje se izračuna z mikrokontrolerjem. Pri obeh navitjih se zaznavanje izvaja s pomočjo vzporednih uporov in ojačevalnikov zaznavanja toka.
Ob koncu poti signala je potreben analogno-digitalni pretvornik za dvojno istočasno vzorčenje, ki digitalne podatke meritev pošilja v mikrokontroler. Jakost, faza in čas posameznega vzbujevalnega toka zagotavljajo informacije o navoru ter hitrosti motorja, ki so potrebne za natančen nadzor.
Zaznavanje toka z uporabo bakrenih uporov tiskanega vezja
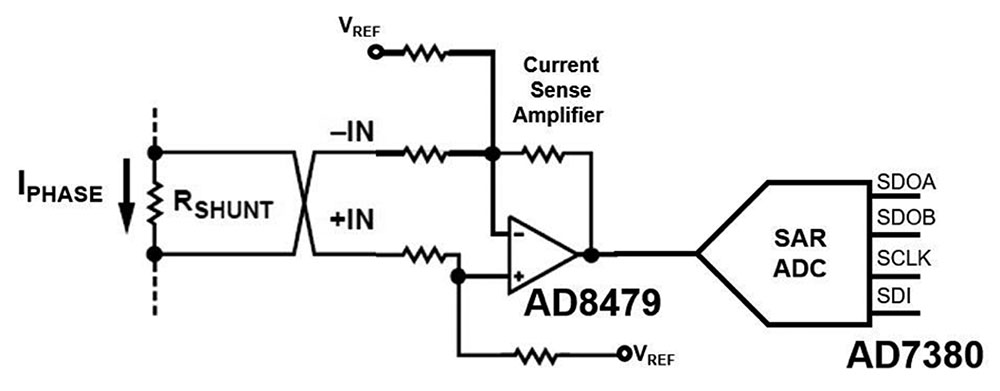
Medtem ko tako natančno načrtovanje meritev in zajemanja podatkov zahteva obilo pozornosti, se postopek začne pri prilagoditvenem vezju z razvojem učinkovitega in cenovno ugodnega načina zaznavanja faznega signala navitja BLDC motorja. To je mogoče storiti z vstavljanjem linijskega upora tiskanega vezja majhne vrednosti (RSHUNT) in uporabo ojačevalnika zaznavanja toka, ki zazna padec napetosti na tem majhnem uporu (slika 2). Ob predpostavki, da je vrednost upora dovolj majhna, bo majhen tudi padec napetosti, strategija merjenja pa bo imela kar najmanjši vpliv na vezje motorja.
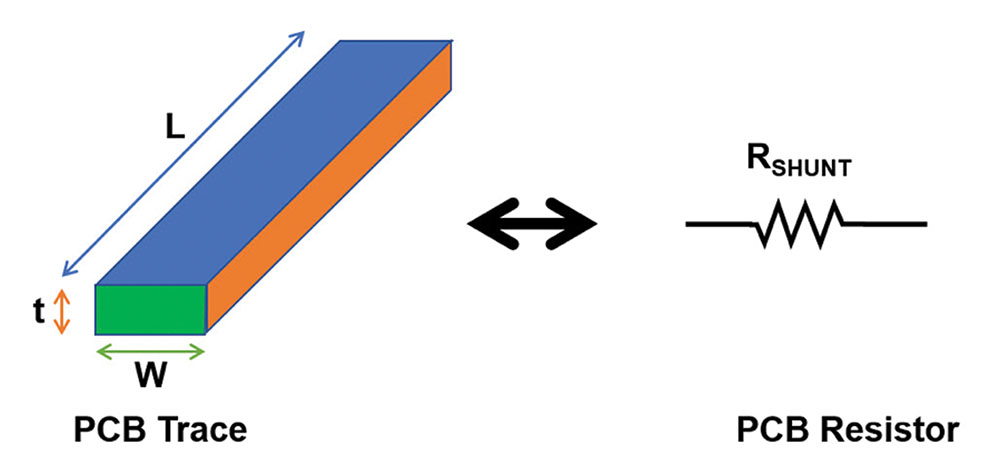
Ojačevalnik zaznavanja toka na sliki 2 zajame trenutni padec napetosti IPHASE x RSHUNT. Analogno-digitalni pretvornik z registrom zaporednega približevanja nato digitalizira ta signal. Vrednost izbire vzporednega tokovnega upora zajema interakcije med vrednostmi RSHUNT, VSHUNT in ISHUNT ter vhodne napake ojačevalnika. Povečanje vrednosti RSHUNT povzroči povečanje vrednosti VSHUNT. Pri tem je dobro, da se zmanjša pomembnost napak pri odklonu napetosti ojačevalnika (VOS) in odklonu mirovnega vhodnega toka (IOS). Vendar izguba moči ISHUNT x RSHUNT pri veliki vrednosti RSHUNT zmanjša močnostno učinkovitost sistema. Poleg tega nazivna moč RSHUNT vpliva na zanesljivost sistema, saj lahko izguba moči ISHUNT x RSHUNT vzpostavi pogoj samosegrevanja, ki lahko privede do spremembe nominalnega upora RSHUNT. Za RSHUNT so na voljo po sebni upori različnih ponudnikov. Vendar cenovno ugodna možnost je uporaba tehnik natančne postavitve za izdelavo upora vezi tiskanega vezja za RSHUNT (slika 3).
Izračunavanje vezi tiskanega vezja za RSHUNT
Ker so temperature pri industrijski uporabi lahko ekstremne, je pomembno, da se pri načrtovanju vzporednega upora tiskanega vezja upošteva tudi temperatura. Na sliki 3 je temperaturni koeficient (α20) vzporednega upora tiskanega vezja z bakreno vezjo pri 20 °C približno 0,39 %/°C (koeficient se spreminja glede na temperaturo). Upor vezi tiskanega vezja določajo dolžina (L), debelina (t), širina (W) in upornost (rñ).
Tiskano vezje z 1 unčo (oz) bakra (Cu) ima debelino (t) enako 1,37 tisočinke palca in upornost (r) 0,6787 mikroohmov (µW) na palec. Območje vezi tiskanega vezja je izmerjeno v obliki kvadrata vezi (⎕), ki je območje L/W. Na primer struktura 2-palčne vezi s širino 0,25 palca je 8 ⎕.
Z zgornjimi spremenljivkami se upor vezi tiskanega vezja z 1 unčo bakra (R•) pri sobni temperaturi izračuna po tej enačbi (enačba 1):
R⎕ ≈ r/t (1 + α20 (T – 20)) Enačba 1 ≈ 0,50 miliohmov (mW)/⎕ (1 + 0.39 %/°C (T – 20˚)) T = temperatura na uporu.
Na primer z začetnim tokom 1 A (največ) na krak BLDC motorja pri tiskanem vezju z 1 unčo bakra ter dolžino (L) RSENSE 1 palec in širino vezi 50 mil (0,05 palca) se lahko RSHUNT pri 20 °C izračuna po enačbah 2 in 3:
L/W = število kvadratov (⎕) Enačba 2 = 1 palec / 0,050 palca = 20 kvadratov RSHUNT = (L / W) x R Enačba 3 = (20 •) x 0,50 mW / ⎕ = 10 mΩ
Izguba moči tega upora z vzporednim tokom 1 A se izračuna po enačbi 4: PSHUNT = ISHUNT2 x RSHUNT Enačba 4 = 1 A2 x 10 mΩ = 0,1 W
Pretvorba analogno-digitalnega pretvornika za istočasno vzorčenje
Analogno-digitalni pretvornik na sliki 2 pretvori napetost na točki faznega cikla v digitalno obliko. Pomembno je, da je del te meritve istočasna fazna napetost vseh treh navitij. Ker gre za uravnotežen sistem (kot je omenjeno zgoraj), je treba izmeriti samo dva od treh navitij; fazno napetost tretjega navitja izračuna zunanji mikrokontroler.
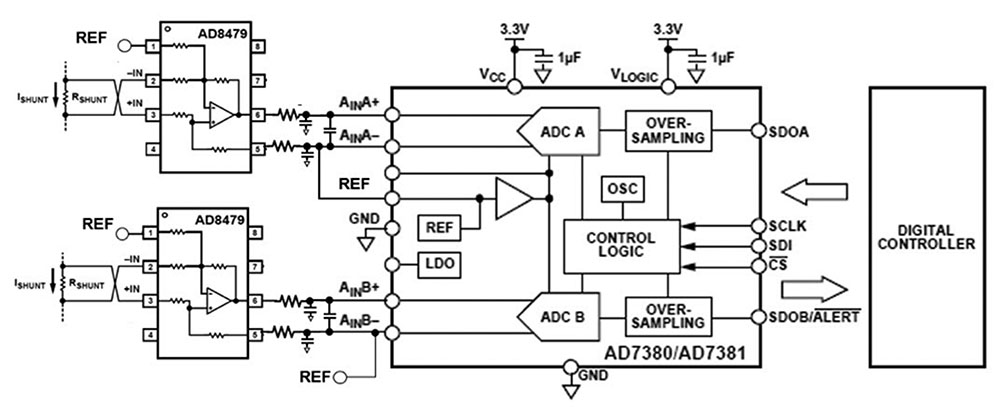
Ustrezni analogno-digitalni pretvornik za ta sistem za nadzor motorja je SAR-ADC za dvojno istočasno vzorčenje AD7380 (slika 4).
Na sliki 4 je prikazan natančni diferenčni ojačevalnik z zelo širokim razponom vhodne asimetrične napetosti (±600 V), ki prenese velike odklone pogona na tok motorja od trifaznega gonilnika brez senzorjev (AD8479). Lastnosti modela AD8479 omogočajo, da ta model nadomesti drage ločitvene ojačevalnike v primerih uporabe, ki ne zahtevajo galvanske ločitve.
Ključne lastnosti modela AD8479 vključujejo tudi majhen odmik napetosti, nizko plazenje odmika napetosti, nizko plazenje ojačitve, nizko plazenje asimetrične potlačitve in izvrstno razmerje potlačitve sofaznega signala (CMRR) za izravnavo hitrih sprememb motorja. AD7380/AD7381 je 16-bitni/14-bitni hiter SAR-ADC pretvornik z majhno porabo za dvojno istočasno vzorčenje s hitrostmi prenosa do 4 M vzorcev/s. Diferenčni analogni vhod sprejema širok razpon asimetrične vhodne napetosti. Vmesna referenčna napetost 2,5 V (REF) je vključena.
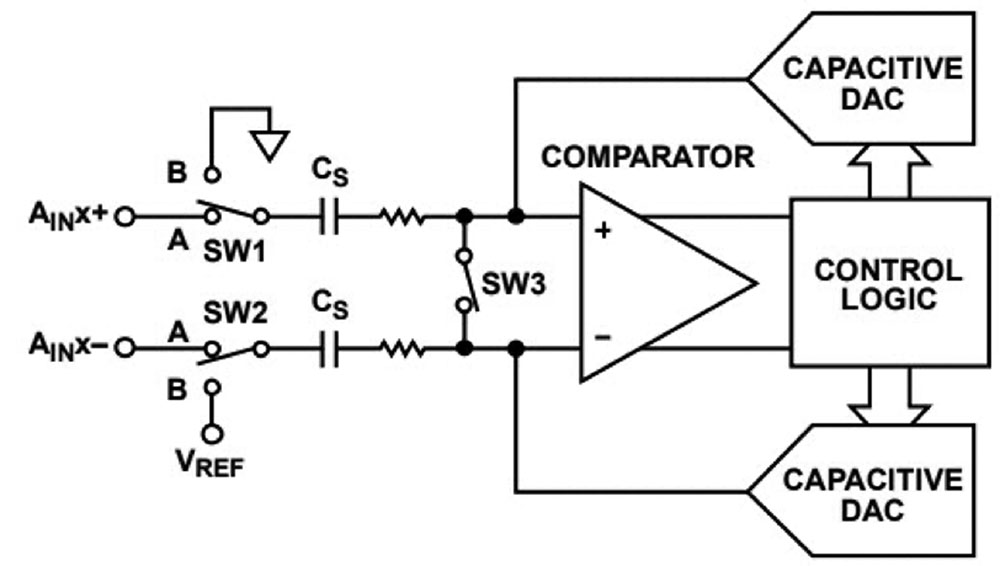
Za doseganje natančnega nadzora navora in hitrosti SAR-ADC struktura za dvojno istočasno vzorčenje zajame trenutno izhodno vrednost ojačevalnika zaznavanja toka. Za ta namen ima AD7380/AD7381 dva enaka notranja analogno-digitalna pretvornika, ki sta časovno sinhronizirana. Zajema tudi stopnjo kapacitivnega vhoda z omrežjem prerazporejanja kapacitivnega polnjenja (slika 5). Na sliki 5 sta VREF in ozemljitev začetni napetosti prek kondenzatorjev za vzorčenje (CS). Ko se SW3 odpre ter SW1 in SW2 zapreta, se sproži zajemanje signala. Ob zaprtju SW1 in SW2 se napetost prek kondenzatorjev za vzorčenje (CS) spremeni glede na napetost na AINx+ in AINx-, kar povzroči neuravnoteženost vhodov primerjalnika. SW1 in SW2 se nato odpreta in zajame se napetost prek CS.
Proces zajemanja napetosti CS vključuje digitalno-analogne pretvornike (DAC). Digitalno-analogni pretvorniki dodajajo/odvzemajo fiksne količine energije v/iz CS, da znova vzpostavijo uravnoteženo stanje primerjalnika. Na tej točki se pretvorba konča, SW1 in SW2 se odpreta, SW3 pa zapre, da se odstrani preostala energija in se izvede priprava na naslednji cikel vzorčenja. V času pretvorbe digitalno-analognega pretvornika logika nadzora ustvari kodo izhoda analogno-digitalnega pretvornika, podatki pa so iz naprave dostopni prek serijskega vmesnika.
Zaključek
Natančna meritev navora in hitrosti BLDC motorja se začne z natančnim, cenovno ugodnim vzporednim uporom. Kot je bilo predhodno ugotovljeno, se ta lahko stroškovno učinkovito uvede z uporabo vezi tiskanega vezja.
V povezavi s kombinacijo ojačevalnika zaznavanja toka AD8479 in analogno-digitalnega pretvornika z registrom zaporednega približevanja za dvojno vzorčenje AD7380 je mogoče ustvariti zelo natančno, robustno prilagoditveno vezje za meritve sistema za nadzor navora in hitrosti motorja za delovnemu okolju škodljive primere uporabe.
{kind=link}