 Analog Devices, Inc.
Analog Devices, Inc.
Avtorja: Leo Guo in Nandin Xu, oba ADI Kitajska
Ali ima sistem za merjenje temperature z uporovnim senzorjem temperature (RTD) stalne napake? Ali je mogoče visokoprecizni sistem za merjenje temperature z RTD zasnovati brez potrebe po umerjanju?
V tem članku je predstavljen visokoprecizni sistem za merjenje temperature z RTD, ki s kompenzacijo napak doseže natančnost ±0,15 °C v območju od -25 °C do +140 °C brez potrebe po umerjanju.
Predpogoj za kompenzacijo napak je skladnost napak v sistemu za merjenje temperature. V tem članku je predstavljena teoretična metoda izračuna napak pri sistemu za merjenje temperature z RTD in poskus čim večjega zmanjšanja virov napak. Nato se za merjenje napake sistema za merjenje temperature z RTD izberejo različne temperaturne vrednosti v območju od -25 °C do +140 °C. Na podlagi skladnosti krivulje napake pri merjenju temperature različnih merilnih kanalov se poišče izraz funkcije prilagajanja krivulje napake in uporabi za izravnavo napake sistema za merjenje temperature.



Preveri se učinkovitost te metode pri izboljšanju natančnosti sistema za merjenje temperature. Napaka v celotnem območju se znatno zmanjša z -0,8 °C do +0,2 °C na -0,15 °C do +0,15 °C. Na koncu so predstavljeni izmerjeni šum in napaka sistema za merjenje temperature.
Izbira RTD
Temperaturni senzorji so pomemben del sistemov za merjenje temperature, saj pretvarjajo temperaturne signale v električne signale, kar omogoča merjenje temperature. Običajne vrste temperaturnih senzorjev vključujejo termočlene, RTD-je, termistorje in integrirane temperaturne senzorje.





Med njimi ima RTD več prednosti, kot so dobra linearnost, široko območje merjenja temperature, visoka natančnost in dobra stabilnost, zaradi česar se pogosto uporablja v aplikacijah za merjenje temperature.
Proizvajalci RTD-jev so TE Connectivity, Heraeus, Honeywell in drugi. Večina proizvajalcev RTD proizvaja RTD-je, ki so skladni s standardom IEC 60751, ki platinaste RTD-je deli v štiri razrede točnosti: AA, A, B in C. Pri izbiri RTD je treba celovito preučiti dejavnike, kot so temperaturno merilno območje, toleranca in cena. Serija PTF družbe TE Connectivity vključuje vrsto RTD-jev, izdelanih iz platinastih uporov z uporabo najnovejše tehnologije tankih plasti. V tabeli 1 so predstavljena merilna območja, tolerance in cene teh RTD-jev.
Tabela 1
Kot je prikazano v tabeli 1, se toleranca RTD-jev s spreminjanjem razreda postopoma povečuje, pri čemer je toleranca tem manjša, čim višji je razred. Po celoviti analizi je bilo ugotovljeno, da ima RTD razreda B široko temperaturno merilno območje, njegova toleranca pa je dovolj majhna, da izpolnjuje potrebe večine industrijskih aplikacij. Poleg tega je cena RTD razreda B razmeroma nizka. Zato je kot temperaturni senzor, uporabljen v tem članku, izbran RTD razreda B, model PTFD101B1A0.
Karakteristična krivulja upornosti in temperature za Pt100
Nemški standard DIN EN 60751 določa razmerje med upornostjo in temperaturo za senzor Pt100, kot je prikazano na sliki 1. Upornost Pt100 je 100 Ω pri 0 °C, njegov temperaturni koeficient pa je 0,385 Ω/°C v določenem temperaturnem območju.
Tudi pretvorbeno razmerje med upornostjo in temperaturo pri seriji PTF ustreza standardu DIN EN 60751. Callendar-Van Dusen-ova formula natančno opisuje prenosno funkcijo med upornostjo Pt100 in temperaturo.
Ko je temperatura T ≥ 0 °C, je prenosna funkcija prikazana v enačbi 1.
Ko je temperatura T < 0 °C, je prenosna funkcija prikazana v enačbi 2.
kjer je enačba 2a:
T je temperatura RTD (°C)
R(T) je upornost RTD pri temperaturi T
R0 je upornost RTD pri 0 °C
Za izračun merjene temperature na podlagi vrednosti upornosti RTD-ja je treba izpeljati obratno funkcijo prenosne funkcije. V tem članku bo za izračun uporabljena formula glede na upornost R.
Če je R ≥ 100 Ω, je enačba 3 sledeča:
Če je R < 100 Ω, se za izračun uporabi polinom petega reda enačba 4:
kjer je:
T(R) je temperatura RTD.
R je upornost RTD pri T °C, druge spremenljivke pa so opredeljene kot prej.
Referenčno vezje in konfiguracija ADC
Da bi dosegli visoko natančnost merjenja temperature, je treba izbrati senzorje z majhnimi napakami, pa tudi zasnovati natančna vezja za obdelavo signalov.





V tem članku smo izbrali AD7124-8 [1], ki je primeren za aplikacije za zelo natančne meritve temperature, in ga ustrezno konfigurirali, da bi čim bolj odpravili vire napak v signalni verigi.
Izbira vrednosti pobudnega toka
Na splošno velja, da večja kot je jakost pobudnega toka, večja je občutljivost merjenja temperature, kar izboljša učinkovitost merjenja temperature. Vendar pa večji pobudni tok ni vedno bolj primeren. Po eni strani je toplotna moč, ki jo ustvarja pobudni tok na RTD, sorazmerna kvadratu toka, in večji kot je tok, večji je učinek samoogrevanja, kar lahko znatno vpliva na merjenje temperature. Po drugi strani pa je omejena s skladnostjo napetosti tokovnega vira. Zato je treba pri izbiri vrednosti pobudnega toka upoštevati tako učinek samoogrevanja kot skladnost napetosti.
Slika 3 prikazuje temperaturno drsenje zaradi samoogrevanja pri tokovnih vrednostih 250 μA, 500 μA in 1000 μA. Vodoravna os predstavlja čas v sekundah, navpična os pa temperaturno drsenje, ki ga povzročajo učinki samoogrevanja, v stopinjah Celzija. Različne barve predstavljajo različne vrednosti toka, pri čemer modra predstavlja 250 μA, rdeča 500 μA in zelena 1000 μA. Vsaka barva ima tri črte, ki predstavljajo rezultate treh različnih kanalov za merjenje temperature z enako vrednostjo toka. Opazimo lahko, da večji kot je pobudni tok, večje je temperaturno drsenje, ki ga povzročajo učinki samoogrevanja. Po izvedbi nadzorovanega poskusa s pobudnim tokom je pobudni tok nastavljen na 250 μA, da se odpravi vpliv samoogrevanja na rezultate meritev.
Skladnostna napetost je najmanjša napetost, ki jo neidealni tokovni vir potrebuje za ohranjanje konstantnega izhodnega toka. Če je napetost pod to vrednostjo, tokovni vir ne more vzdrževati svoje izhodne vrednosti in postane neučinkovit. Skladnostna napetost tokovnega vira v modelu AD7124-8 je 370 mV, ko je izhodni tok nastavljen na 250 μA. Zato napetost na izhodnem priključku tokovnega vira ne sme presegati AVDD-0,37 V, pri čemer je AVDD 3,3 V. Zato mora izbira vrednosti zunanjega upora izpolnjevati naslednje pogoje enačba 5:
Pri čemer je RMAX največja vrednost upora v območju merjenja temperature.
Ratiometrična meritev
S pregledom podatkovnega lista AD7124-8 lahko ugotovite, da je tipična vrednost napake notranjega integriranega tokovnega vira ±4 %. Če se kot referenčna napetost za ADC uporablja referenčni vir skupne napetosti, lahko tokovni vir povzroči napako ojačenja ±4 %. V aplikaciji, opisani v tem članku, bo to v najslabšem primeru povzročilo napako merjenja temperature približno 10,4 °C (100 × 4 %/0,385 = 10,4 °C). Z uporabo ratiometrične merilne metode pa se napaka, ki jo povzroča ta vir napake, popolnoma odpravi.



Izbira referenčnih uporov
Merilno območje temperature PTFD101B1A0 je od -50 °C do +600 °C. V skladu z enačbo Callendar-Van Dusen so ustrezne vrednosti upornosti RTD približno od 80,3 Ω do 313,7 Ω. Zato mora biti nominalna vrednost upornosti referenčnega upora večja od 313,7 Ω, če želite izmeriti celotno območje. V podatkovnem listu je navedeno, da mora biti vhodno območje zunanje referenčne napetosti večje od 0,5 V in manjše od AVDD. Zato velja: 0,5 V < I × RREF < 3,3 V, vendar je treba upoštevati tudi, da RREF ne sme biti prevelik in ne sme presegati meje skladnostne napetosti iz enačbe 5.


Referenčno ADC napetost ustvarja tok, ki teče skozi referenčni upor. Ko se z ratiometrično meritvijo odpravi napaka ojačenja, ki jo povzroča tokovni vir, k napaki referenčne napetosti prispevata le toleranca in temperaturni koeficient referenčnega upora, kar na koncu privede do napake pri merjenju temperature.
Če povzamemo, izberemo upor RG1608V-392-P-T1 proizvajalca Susumu s toleranco le ±0,02 % in nazivno vrednostjo upora 3,9 kΩ ter temperaturnim koeficientom le ±25 ppm/°C. Pri uporabi, opisani v tem članku, je napaka pri merjenju temperature zaradi tolerance le 0,052 °C v najslabšem primeru, izračunana kot 100 × 0,02 %/0,385.
4-žična konfiguracija RTD
RTD se včasih uporablja za merjenje temperature na dolge razdalje. Upornosti dolge kovinske žice ni mogoče zanemariti, kar povzroča napake pri merjenju temperature v sistemu. Trenutno obstajajo tri vrste konfiguracij ožičenja: dvožična, trižična in štirižična. Med njimi ima metoda štirižične povezave najmanjšo napako. Kot je prikazano na sliki 2, so RL1 do RL4 vodilne upornosti.
Ideja štirižične metode je, da se dve žici (RL1 in RL4) uporabita za prenos pobudnega toka, drugi dve žici (RL2 in RL3) pa sta povezani z visoko impedančno merilno enoto za merjenje napetosti na RTD. Ker ima merilni konec zelo visoko vhodno impedanco, skozi vodnik na merilnem koncu ne teče skoraj noben tok, napetost I × R, ki jo tvori upornost vodnika, pa je skoraj nična, s čimer se odpravi napaka, ki jo povzroča upornost vodnika. Če se uporablja dvožična metoda, je nazivna upornost 0,25 mm2 bakrene žice 0,08 Ω/meter. Če ima RTD vodnike dolžine 1 m, je skupna upornost vodnikov enaka 0,16 Ω. Temperaturni koeficient RTD je približno 0,385 Ω/°C. Zato upornost 0,16 Ω povzroči napako (0,16/0,385) = 0,42 °C zaradi upornosti vodnika.
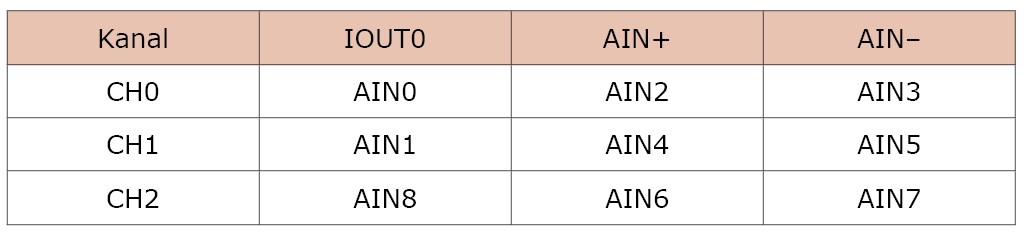
V tem članku je uporabljena metoda štirižične RTD konfiguracije in omogoča, da si več RTD-jev deli referenčni upor. AD7124-8 lahko poveže do pet štirižičnih RTD-jev. V tem članku je vsaka naprava AD7124-8 povezana s tremi štirižičnimi RTD-ji, kar sistemu omogoča tri kanale za merjenje temperature. V večkanalnih aplikacijah so trije kanali časovno multipleksirani, izhodni priključki tokovnih virov in diferenčni analogni vhodni priključki, ki ustrezajo vsakemu kanalu, pa so prikazani v tabeli 2.
Tabela 2: Konfiguracije kanalov
Omejilni upor
Če je omogočen ojačevalnik referenčne napetosti, je treba upoštevati mejo vhodne napetosti na vodilu. Ko je buffer omogočen, je absolutno območje vhodne napetosti vhodne sponke referenčne napetosti od AVSS 0,1 V do AVDD 0,1 V. Če je en konec referenčnega upora neposredno ozemljen, bo napetost na priključku REFIN1 enaka AVSS, kar presega dovoljeno vhodno območje. Zato je dodan omejilni upor, katerega upornost mora biti večja od 0,1 V/250 μA = 400 Ω. V tem članku je za vrednost omejilnega upora izbrana vrednost 510 Ω, ki zagotavlja zadostno rezervo, hkrati pa ne krši zahtev glede skladnosti napetosti.
Izbira ojačenja
Poleg merilnih napak, ki jih povzročajo periferna vezja, obstajajo tudi viri napak znotraj ADC, ki lahko povzročijo določene napake.
AD7124-8 ima vgrajen PGA, ki se lahko uporablja za ojačenje vhodnega signala z različnimi dobitki, s čimer se v celoti izkoristi veliko dinamično območje ADC in zmanjša merilna negotovost, ki jo povzroča kvantizacijski šum. Vendar ima PGA tudi napako pri ojačenju, ki je razvidna iz podatkovnega lista. Če je ojačenje = 1 in PGA ni omogočen, je največja napaka ojačenja le ±0,0025 %, ker se vsak AD7124-8 tovarniško kalibrira.


Ko je ojačenje > 1 in je omogočena funkcija PGA, tipična napaka ojačenja doseže -0,3 %, zato je treba izvesti notranjo kalibracijo ojačenja, da se zmanjša nedopustna napaka ojačenja, ki jo povzroča funkcija PGA. Ko je ojačenje nastavljeno na 2, 4 ali 8, največja napaka ojačenja po kalibraciji znaša ±0,016 %, kar je približno desetkrat več kot napaka pri ojačenju = 1. Seveda izbira ojačitve ne spremeni le napake ojačenja, temveč tudi nelinearnost integrala. V članku je uporabljena konfiguracija z ojačenjem = 1, ker je merilna napaka zaradi kvantizacijskega šuma manjša od napake ojačenja po kalibraciji pri ojačenju > 1.
Digitalni filter
Sinc4 filter in 10 SPS izhodna podatkovna hitrost sta v tem članku izbrana iz naslednjih razlogov.
Prednost izbire filtra sinc4 z 10 SPS hitrostjo izhodnih podatkov je v tem, da ima sinc filter izredno visoko dušenje pri večkratnikih hitrosti izhodnih podatkov, drugi vidik pa je učinkovita vrednost šuma. Pri polni moči, ojačenju = 1, izhodna hitrost podatkov 10 SPS in filtra sinc4 je efektivna vrednost šuma 0,23 μV, šum od vrha do vrha pa 1,5 μV. Ločljivost od vrha do vrha je 21,7 bitov, kar se pri merjenju temperature pretvori v 1,5 μV/250 μA/0,385 (Ω/°C) = 0,0156 °C. Dejanski temperaturni šum med merjenjem je prikazan na sliki 4.
Interna kalibracija
AD7124-8 ima funkcijo notranje kalibracije, ki lahko močno zmanjša napako ojačenja in napake ničelne napetosti ADC. Ker se pri AD7124-8 tovarniško izvede kalibracija ojačenja pri ojačenju = 1, ADC ne podpira notranje kalibracije ojačenja, ko je izbrano ojačenje = 1. Zato v tem članku za napako ojačenja ni izvedena notranja kalibracija ojačenja, temveč je neposredno uporabljena zmogljivost po tovarniški kalibraciji ojačenja pri ojačenju = 1.
Po resetu sistema bo sistem vsakič izvedel notranjo kalibracijo kompenzacije AD7124-8, da bi zmanjšal napako kompenzacije. Na ta način se lahko napaka ničelne napetosti in njegov temperaturni zdrs zmanjšata na območje šuma. Tipična napaka ničelne napetosti AD7124-8 je ±15 μV, ki se pri merjenju temperature pretvori v 15 μV/dobitek = 1/250 μA/0,385 = 0,156 °C. Po notranji kalibraciji ničelne napetosti je najvišja napaka ničelne napetosti približno polovica vrednosti šuma od vrha do vrha, zaradi česar je napaka pri merjenju temperature le približno 0,008 °C.
Tabela 3: Tabela analize sistematičnih napak
Plan testiranja preskusne opreme za analizo napak
Po izračunu teoretičnega delovanja sistema je treba z meritvami preveriti dejansko delovanje sistema. Za sistem za merjenje temperature je najpomembnejša specifikacija delovanja določitev napake med izmerjeno vrednostjo temperature in pravo vrednostjo temperature. Zato je za merjenje te specifikacije potreben natančen vir temperature s širokim razponom. Fluke Calibration ima bogate izkušnje na področju kalibracije temperature, njegovi izdelki pa zagotavljajo zanesljive standarde za različne scenarije merjenja temperature.
Flukova prenosna kalibracijska kopel 7109A lahko segreje ali ohladi tekočino v kopeli z nadzorovanim temperaturnim izhodnim območjem od -25 °C do +140 °C in natančnostjo ±0,1 °C. V primerjavi z ±0,414 °C ±0,1 °C ni mogoče zanemariti. Zato potrebujemo natančnejši termometer skupaj z merilnikom 7109A, da tvori natančnejši vir. Flukov sistem za merjenje temperature, ki ga sestavljata platinasti uporovni termometer 5615-12 in prenosni termometer 1529, lahko po umerjanju doseže natančnost ±0,012 °C pri 0 °C. Pri nadaljnjih poskusih je Flukejev sistem za merjenje temperature standard, njegovi odčitki pa veljajo za prave vrednosti temperature merjene tekočine.



Opozoriti je treba, da temperaturno polje tekočine v termostatu ni izotermno. Glede na tehnične specifikacije termostata 7109A je tipična vrednost njegove enakomernosti 0,02 °C, kar pomeni, da je največja temperaturna razlika med dvema točkama v termostatu hkrati 0,02 °C. To lahko povzroči napake pri ponovnih poskusih, ker temperaturnega senzorja ni mogoče postaviti na popolnoma enak položaj kot pri prejšnjem poskusu.
Testna metoda
V termostat namestite termometer s platinastim uporom in v tem članku izbranim RTD, termostat nastavite na določeno fiksno vrednost temperature in počakajte, da se temperatura stabilizira. Vrednosti sistema za merjenje temperature Fluke in sistema za merjenje temperature AD7124-8 se zabeležijo istočasno. Odčitek sistema se upošteva kot prava vrednost, odčitek sistema za merjenje temperature AD7124-8 pa kot izmerjena vrednost. Če odštejemo obe vrednosti, dobimo dejansko napako merjenja temperature sistema za merjenje temperature AD7124-8, kot je prikazano v enačbi 6.
kjer velja:
Tmeasured je odčitek sistema za merjenje temperature AD7124-8.
Ttrue je odčitek sistema za merjenje temperature Fluke.
error [T] je dejanska napaka merjenja temperature sistema za merjenje temperature AD7124-8 pri T °C.
Nastavljene vrednosti temperature pod nič stopinj so izbrane kot -25 °C, -20 °C, -15 °C, -10 °C, -5 °C, 0 °C, medtem ko so nastavljene vrednosti temperature nad nič stopinj izbrane kot 0 °C, 10 °C, 25 °C, 37 °C, 55 °C, 70 °C, 85 °C, 100 °C, 120 °C in 140 °C.
Kadar je temperatura pod nič stopinj, je tekočina, uporabljena v termostatu, industrijski alkohol s čistostjo 99 %, saj je temperatura zmrzovanja alkohola razmeroma nizka. Kadar je temperatura nad ničlo, je tekočina v termostatu silikonsko olje, ker je alkohol hlapljiv in lahko zlahka povzroči nesrečo.



RTD sonda
Izpostavljen RTD je občutljiv na različne snovi v okolju, poleg tega pa je slabo vodotesen in odporen na prah. Predvsem voda lahko resno vpliva na vrednost upornosti RTD. Zato je treba izdelati vodotesno ohišje za RTD. V tem članku je bila izdelana preprosta sonda iz nerjavnega jekla za zaščito RTD, kot je prikazano na sliki 5. Metoda izdelave je, da se RTD vstavi v tulec iz nerjavnega jekla, nato pa se odprtina tulca napolni s silikonskim gelom. Ko se silikonski gel strdi, se lahko vstavi v termostat za merjenje temperature. Ta metoda ni odlična vodoodporna rešitev, uporablja se le med poskusom. V praktičnih aplikacijah mora biti vodotesnost RTD bistvena vsebina načrtovanja, ki je projektanti ne smejo zanemariti.
Treba je omeniti, da pri visokih temperaturah nad 670 °C sonda iz nerjavnega jekla sprošča kovinske ione, ki lahko kontaminirajo platino visoke čistosti, zaradi česar se spremeni vrednost upornosti RTD. Zato je treba pri meritvah pri visokih temperaturah RTD zaščititi s sondami iz kremenčevega stekla ali platine. Ti materiali lahko ohranijo inertnost pri visokih temperaturah in RTD tako ostane brez kontaminacije.
Testni rezultati
Ta preskus v celoti uporablja 14 kosov RTDS PTFD101B1A0, oštevilčenih od RTD1 do RTD14, ki so naključno združeni s tremi AD7124-8 in priključeni na vhodno sponko signala na razvojni plošči vsakega vezja AD7124-8 v skladu s tabelo 4. Nato se RTD sonde namestijo v termostat pri različnih vrednostih temperature za merjenje temperature, izmerjene vrednosti temperature pa se primerjajo z dejanskimi vrednostmi.
RTD številka EVB številka ADC kanal
RTD1 EVB1 CH0
RTD2 EVB1 CH1
RTD3 EVB1 CH2
RTD4 EVB2 CH0
RTD5 EVB2 CH1
RTD6 EVB2 CH2
RTD7 EVB3 CH0
RTD8 EVB3 CH1
RTD9 EVB3 CH2
RTD10 EVB1 CH0
RTD11 EVB1 CH1
RTD12 EVB1 CH2
RTD13 EVB2 CH0
RTD14 EVB2 CH1
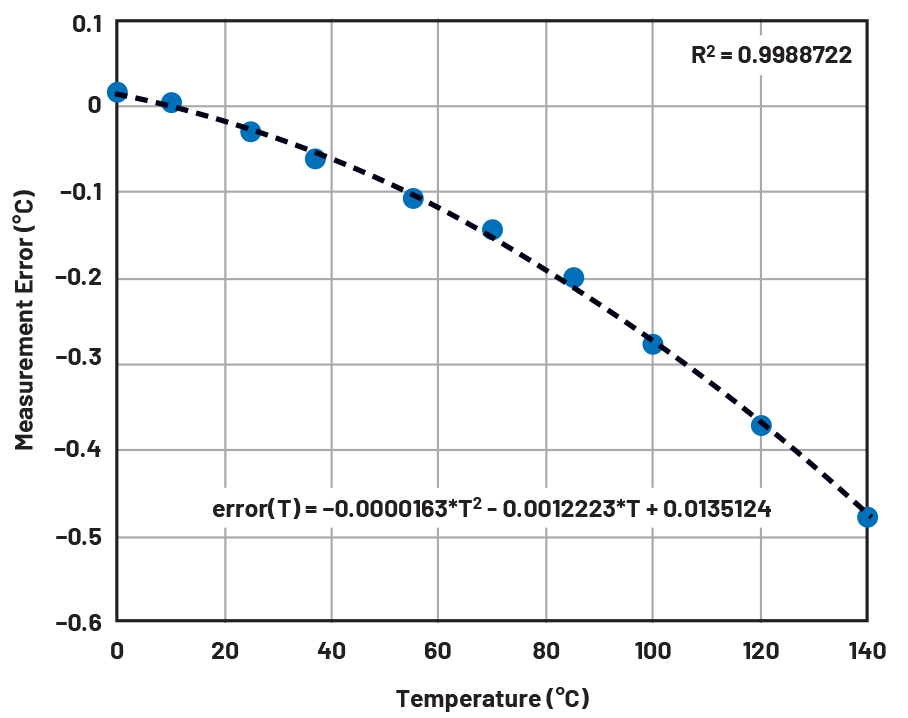
Napake več temperaturnih vrednosti se združijo, da se dobi krivulja napak sistema za merjenje temperature v območju od -25 °C do +140 °C. Sliki 6 in 7 prikazujeta krivulje napak meritev temperature nad ničlo in pod ničlo za 14 kanalov, ki merijo temperaturo. Vodoravna os na sliki predstavlja temperaturo v °C, nastavljeno s termostatom, navpična os pa merilno napako v °C. Očitno je, da ne glede na to, ali je temperatura pod ali nad 0 °C, 14 kanalov RTD za merjenje temperature ustreza 14 krivuljam napake, ki imajo dosledne vzorce spreminjanja. Zato lahko podatke, pridobljene pri dejanskem preskusu, prilagodimo krivulji, da dobimo funkcijo napake [T] sistema za merjenje temperature AD7124-8. Če ima lahko ta izraz funkcije določen učinek izravnave napake na sisteme za merjenje temperature AD7124-8, proizvedene z istim postopkom, potem lahko uporaba funkcije neposredno v programu za izravnavo napake prihrani postopek umerjanja v proizvodnji in znatno izboljša delovanje sistema za merjenje temperature glede na stanje brez umerjanja.
Prilagajanje krivulj
Čeprav imajo krivulje napak pri merjenju temperature 14 RTD merilnih kanalov dosleden trend, se njihovi nakloni in presečišča do neke mere razlikujejo zaradi razlik v proizvodnji. Da bi zagotovili kompenzacijo napak za vse RTD merilne kanale, proizvedene s tem postopkom, je treba poiskati srednjo krivuljo območja, ki ga obdaja 14 krivulj napak merjenja temperature. Bolj primerno bi bilo opisati funkcijo napake z uporabo parcialne funkcije, razdeljene na dva dela: nad ničlo in pod ničlo.
Najprej opazujte krivuljo napake merjenja temperature nad ničlo. Sprememba napake pri merjenju temperature med 0 °C in 140 °C je krivulja, ki je blizu napake kvadratne funkcije (T) = AT2 + BT + C (T > 0).
V tem članku je kot konstantni člen C funkcije napake izbrana povprečna vrednost tretje največje in tretje najmanjše vrednosti napake pri 0 °C. Razlog za izbiro napake pri 0 °C je, da je vrednost upornosti RTD pri 0 °C njegova nazivna vrednost upornosti. Razlog za to, da ne izberete dveh RTD merilnih kanalov z največjimi in najmanjšimi napakami, je ta, da je večja verjetnost, da sta okvarjena. Druga največja in druga najmanjša vrednost napake sta lahko tudi specifični. Zato se izbereta tretja največja in tretja najmanjša vrednost napake. Domneva se, da bo večina dobrih izdelkov spadala v območje napak (-0,04680 °C, +0,08392 °C), ki ga obdajata tretja največja in tretja najmanjša vrednost napake. Zato lahko s srednjo vrednostjo 0,01855 °C kot kompenzacijo optimiziramo delovanje večine dobrih izdelkov znotraj območja napak ±0,06537 °C pri 0 °C.
Koeficienta A in B dobimo s prilagajanjem krivulje, kot je prikazano na sliki 8. Diskretne točke, uporabljene pri prilagajanju krivulje, so povprečje 14 vrednosti napak, izmerjenih pri vsaki fiksni vrednosti temperature. Obstaja 10 fiksnih temperaturnih vrednosti nad ničlo, zato prilagajanje krivulje temelji na najboljšem prilagajanju teh 10 diskretnih točk, korelacijski koeficient R2 prilagajanja krivulje pa doseže vrednost 0,9989. Nazadnje je funkcija napake nad ničlo določena kot enačba 7.
Opazujte krivuljo napake merjenja temperature pod ničlo. Vidimo, da se temperaturna napaka ne spreminja s temperaturo med -25 °C in 0 °C. Zato je krivulja napake pod ničlo funkcija, ki je blizu konstantni napaki [T] = D (T < 0). Podobno je vrednost D v funkciji napake določena kot povprečje tretje največje in tretje najmanjše vrednosti napake pri 0 °C. Nazadnje je funkcija napake pod ničlo določena z enačbo 8.
Izboljšanje natančnosti po kompenzaciji napak
Ko dobimo funkcijo napake, jo uporabimo v programu mikrokontrolerja za kompenzacijo izmerjene vrednosti temperature. Ko dobimo binarne podatke, ki jih pretvori ADC, izračunamo izmerjeno vrednost T z enačbama 3 in 4, nato pa kompenziramo napako z enačbo 8. Z drugimi besedami, za umerjanje vseh kanalov za merjenje temperature RTD uporabljamo isto funkcijo napake, kar je metoda umerjanja, ki prihrani čas in poveča natančnost ter kompenzira napake v celotnem merilnem območju enačba 9.
kjer je:
T’izmerjena je merilna vrednost po kompenzaciji napake, druge spremenljivke pa so opredeljene prej.
Na koncu moramo preveriti, ali je kompenzacija s funkcijo napake učinkovita. Z odštevanjem kompenzirane merilne vrednosti od prave vrednosti lahko dobimo merilno napako po kompenzaciji, kot je prikazano v enačbi 10.
kjer je:
error‘ [T] je napaka po izravnavi napake pri T(°C), ostale spremenljivke pa so definirane že prej.
Izbrali smo devet RTD-jev in tri naprave AD7124-8, da bi oblikovali 9 kanalov za merjenje temperature RTD-jev v skladu z metodo kombiniranja, prikazano v preglednici 5. RTD-ji so nameščeni v termostat, za merjenje temperature pa je izbrana enaka fiksna vrednost temperature nad ničlo kot prej.
RTD številka EVB številka ADC kanal
RTD1 EVB1 CH0
RTD2 EVB1 CH1
RTD3 EVB1 CH2
RTD4 EVB2 CH0
RTD5 EVB2 CH1
RTD6 EVB2 CH2
RTD7 EVB3 CH0
RTD8 EVB3 CH1
RTD9 EVB3 CH2
V območju nad ničlo opazimo kompenzacijski učinek napak pri merjenju temperature. Začetne napake merjenja temperature in napake po kompenzaciji so prikazane na slikah 9 in 10.
Rezultati, prikazani na sliki, kažejo, da lahko pri temperaturi od 0 °C do 140 °C kompenzacija napak zmanjša napako merjenja temperature z -0,8 °C do +0,2 °C na -0,3 °C do +0,15 °C v tem temperaturnem območju.
Nato opazujte učinek kompenzacije napake pri merjenju temperature v temperaturnem območju pod ničlo in za merjenje temperature izberite enako fiksno vrednost temperature pod ničlo. Začetna napaka merjenja temperature in kompenzirana napaka merjenja temperature sta prikazani na slikah 11 in 12.
Rezultati, prikazani na sliki, kažejo, da ko je izmerjena temperatura v območju od -25 °C do 0 °C, lahko kompenzacija napake spremeni območje napake z -0,1 °C do +0,15 °C na -0,15 °C do +0,1 °C.
Zaključimo lahko, da v temperaturnem območju od -25 °C do +140 °C napake pri merjenju temperature po kompenzaciji s funkcijo napake ohranimo v mejah ±0,3 °C, 8 od 9 kanalov za merjenje temperature RTD pa lahko v temperaturnem območju od -25 °C do +140 °C ohrani napako merjenja temperature v mejah ±0,15 °C, kar znatno izboljša natančnost merjenja temperature.
Predstavitev novih izdelkov
ADI je na podlagi AD7124-8 razvil novo generacijo čipa AD4130-8, ki ga odlikuje izjemno nizka poraba energije in majhnost. Kot je prikazano v podatkovnem listu, je tipična poraba energije v načinu neprekinjene pretvorbe z ojačenjem PGA = 1 do 16, ko sta omogočena notranji oscilator in notranja referenca, 35 μA. V načinu z razmerjem delovnega cikla 1/4 se tipična poraba energije zmanjša na 11 μA, v načinu z razmerjem delovnega cikla 1/16 pa se tipična poraba energije zmanjša na samo 4,35 μA. Tako visoko zmogljivost je mogoče doseči v WLCSP ohišju velikosti le 3,6 mm × 2,74 mm.
Podobno je AD4130-8 primeren tudi za merjenje temperature, zato v ploščo AD4130-8 EVB vstavimo RTD9 in tako oblikujemo kanal za merjenje temperature. AD4130-8 je konfiguriran kot 10 SPS, sinc3 digitalni filter, način polne moči, ojačenje PGA = 1 in pobudni tok = 200 μA ter ima omogočen analogni vhodni ojačevalnik in ojačevalnik referenčne napetosti.
Preizkuša se delovanje sistema za merjenje temperature AD4130-8 glede šuma. Posneli smo 100 vzorcev podatkov o temperaturi s hitrostjo 10 SPS v trajanju 10 sekund. Rezultati so prikazani na sliki 13.
Kot je prikazano na Sliki 13, je vrednost šuma od vrha do vrha v 100 vzorcih, ki jo izmeri AD4130-8 v zgoraj omenjeni konfiguraciji, 0,04 °C. Ta vrednost je nekoliko večja od vrednosti pri modelu AD7124-8, vendar je povezana z znatnim zmanjšanjem porabe energije.
Poleg tega se izmeri napaka merjenja temperature sistema za merjenje temperature AD4130-8. V termostat vstavite RTD9, izberite 15 fiksnih temperaturnih vrednosti kot prej v območju od -25 °C do +140 °C in zabeležite napako merjenja temperature kanala za merjenje temperature RTD pri vsaki temperaturi. Poleg tega rezultate primerjamo s krivuljo napake pri merjenju temperature, ki jo dobimo iz kanala za merjenje temperature, ki ga tvorita RTD9 in AD7124-8. Rezultati so prikazani na sliki 14.
Kot je prikazano na sliki, se napaka pri merjenju temperature sistema AD4130-8 v temperaturnem območju od -25 °C do +140 °C bistveno ne razlikuje od napake sistema AD7124-8.
Zaključek
V tem članku smo izbrali temperaturni senzor PTFD101B1A0 RTD in ga združili z ADC sigma-delta (Σ-Δ) AD7124-8, da bi oblikovali sistem za merjenje temperature s ciljem zmanjšati vire napak. Podrobno je bila opisana optimizirana konfiguracija čipa in njegovih perifernih naprav. Odlično delovanje sistema za merjenje temperature, zasnovanega v tem članku, je bilo dokazano z dejanskimi preskusi: med proizvodnim procesom ni bil potreben postopek umerjanja; izmerjena temperaturna napaka se lahko ohrani v mejah ±0,3 °C v temperaturnem območju od -25 °C do +140 °C, tipična vrednost temperaturne napake pa je približno ±0,15 °C. Zaradi izbire cenovno učinkovitih RTD, ADC in perifernih naprav je celotna rešitev za merjenje temperature cenovno učinkovita, hkrati pa ohranja visoko natančnost. AD4130-8 je s svojimi izjemnimi možnostmi merjenja temperature, izjemno nizko porabo energije in kompaktno velikostjo primeren za široko paleto aplikacij in tržnih priložnosti.
O avtorjih
Leo Guo se je podjetju ADI Shanghai pridružil leta 2021 kot aplikacijski inženir in zagotavlja tehnično podporo za precizne sigma-delta ADC izdelke na Kitajskem. Na univerzi Xi‘an Jiaotong je diplomiral iz elektrotehnike in avtomatizacije. V prostem času rad igra košarko.
Nandin Xu je inženir za uporabo izdelkov v podjetju Analog Devices v Šanghaju na Kitajskem. Odgovoren je za tehnično podporo za RDC, izolirane modulatorje in precizne ADC/DAC izdelke na Kitajskem. Podjetju ADI se je pridružil leta 2013, potem ko je na Huazhong University of Science and Technology v Wuhanu na Kitajskem magistriral iz znanosti in tehnologije vodenja. Je navdušenec nad košarko in nogometom.
Vir:
1:https://www.analog.com/en/products/AD7124-8.html
{kind=link}