![]()
Naša zamisel peke palačink počasi dobiva programske vrstice, s katerimi bomo to (vsaj teoretično) tudi dosegli. Še enkrat poudarjam, da je to le čista, teoretična osnova, na kateri temelji osnovni program. Vse težave, ki jih bomo morali reševati v praksi, je nemogoče predvideti, niti se vsem ne moremo izogniti. Običajno rešujemo le tiste, ki se pojavijo najpogosteje in ki očitno prevečkrat zmotijo celoten proces.

Če bomo na primer pri tridesetih začetih ciklih dejansko spekli le deset palačink, to ni ravno uspeh, zato bomo morali posamezne operacije analizirati in prepoznati tisto, ki nam povzroča največ težav. Morda je kriva mehanska rešitev, morda pa bomo lahko težavo rešili le z dodatnim nadzorom, senzorji, časovniki ali kakšnim mehanskim dodatkom. Nič nenavadnega ni, da opisi »dišijo« po mehatroniki, saj gre pri načrtovanju takšne naprave za usklajeno načrtovanje skupine strokovnjakov z različnih področij.

Ponev smo naoljili in sedaj se segreva, vanjo pa bomo vlili pripravljeno maso. Vendar je priporočljivo, kot je to običaj pri »ročni« peki palačink, pred vsakim vlivanjem mase v ponev, maso dobro premešati, saj se sicer počasi dela vse debelejša usedlina moke, ki je na koncu popolnoma neuporabna. Maso bomo zato z mešalnikom premešali do dna, nato pa maso vlili v ponev.
3. Operacija
Mešanje pripravljene mase
- Potrebni vhodi: 3
- Senzorji obeh končnih in vmesnega položaja
- Potrebni izhodi: 2
- Vklop rotacijskega cilindra
- Vklop motorja mešalnika
- Potrebni časovniki: 1
- Čas mešanja mase

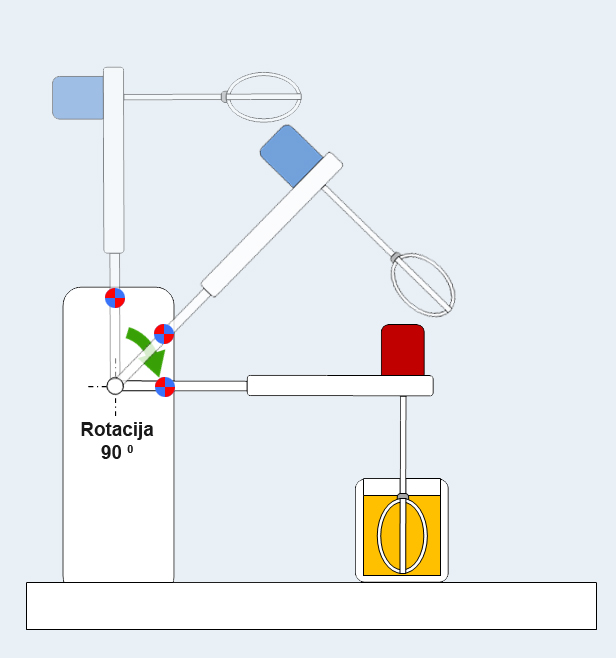
Morda bo najbolje, da zadevo pojasnimo s sliko 1. Mešalnik je na začetku izklopljen in v pokončnem položaju. V tem položaju so metlice umaknjene izven območja posode z maso za palačinke. Ta položaj bomo označili kot izhodiščni položaj. Z rotacijskim cilindrom začnemo vrteti mešalnik za skupni kot 90°. Ko smo na pol poti, torej na 45°, že lahko vklopimo motor mešalnika, saj bo mešanje potekalo veliko »mehkeje«, če se bo v maso potopila vrteča se metlica mešalnika. Ko dosežemo spodnjo končno točko, začnemo odštevati čas, ki ga določimo s poskusom. Recimo, da je čas mešanja 5 sekund.
Ko teh 5 sekund poteče, moramo mešalnik spet dvigniti iz mase, vendar se mora še nekaj časa vrteti, da se »otrese«. To je lahko spet izvedeno s časovnikom, bolj natančno pa bi bilo, če bi točko izklopa določili s položajem nekega vmesnega senzorja. Ta isti senzor bi potem lahko uporabili tudi za vklop motorja, kadar bi metlice spuščali v posodo. Položaji senzorjev za oba končna in vmesni položaj so na sliki 1 narisani z modro-rdečimi krogi. Program imamo izpisan na sliki 2.
Posamezna prečka se začne izvajati, če je bila prej izvedena predhodna. Prva prečka te operacije se začne izvajati, če je bila predhodna operacija dokončana, kar označimo s postavljanjem (S) notranje zastavice ROp_XX_1. XX v imenu zastavice pomeni številko operacije, ki naj se začne izvajati. V našem primeru je pogoj za začetek izvajanja tretje operacije postavljena zastavica ROp_03_1 (na sliki 2 v prečki 11).
MiniPLC – krmilnik – Trgovina
Programiranje mikrokontrolerjev z lestvično logiko LDmicro (5)
AX elektronika d.o.o.
2015_SE226_44
{kind=link}