 Avtor: Primož Šlajna
Avtor: Primož Šlajna
E-pošta: prsajna@gmail.com
2019_278_54
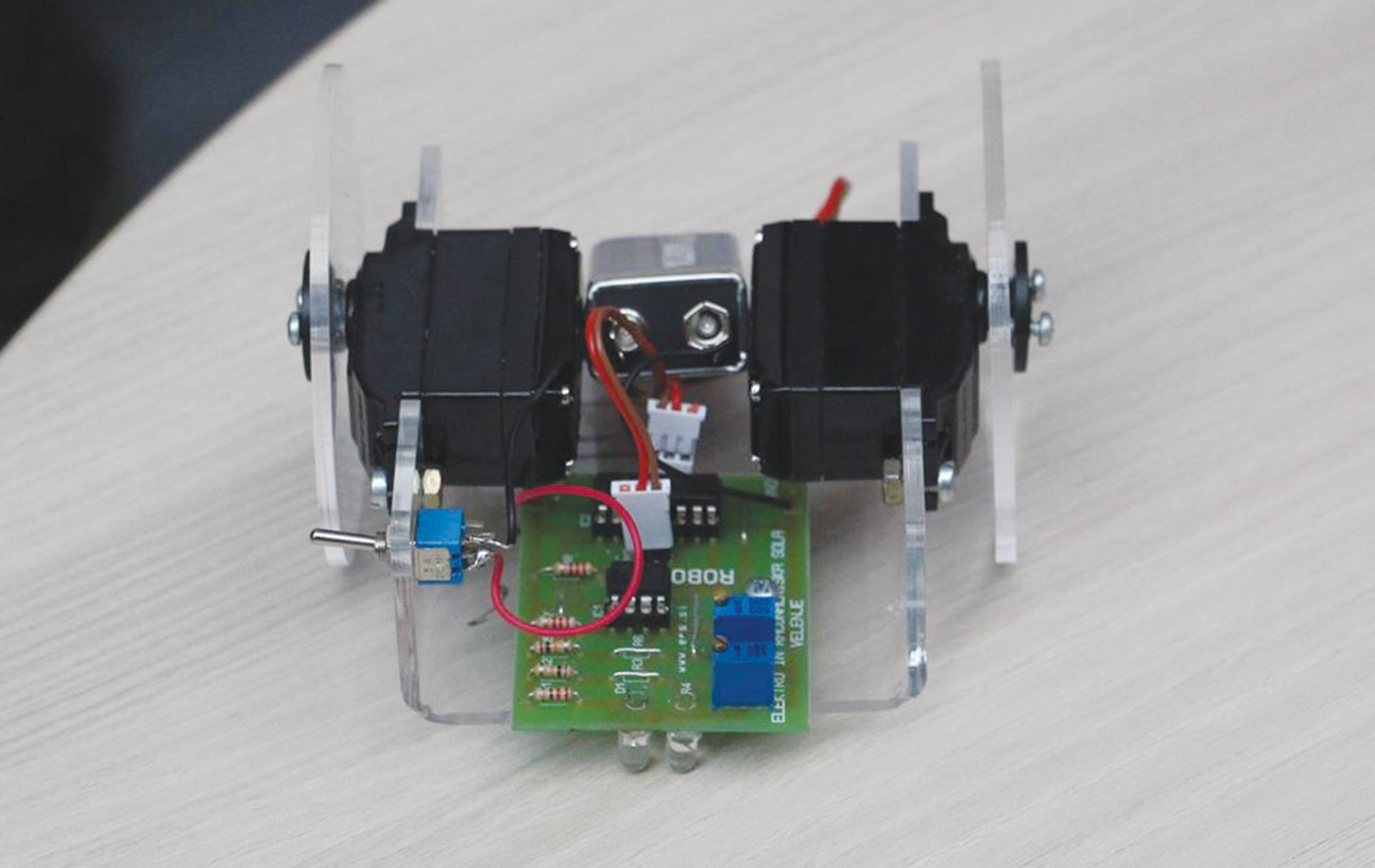
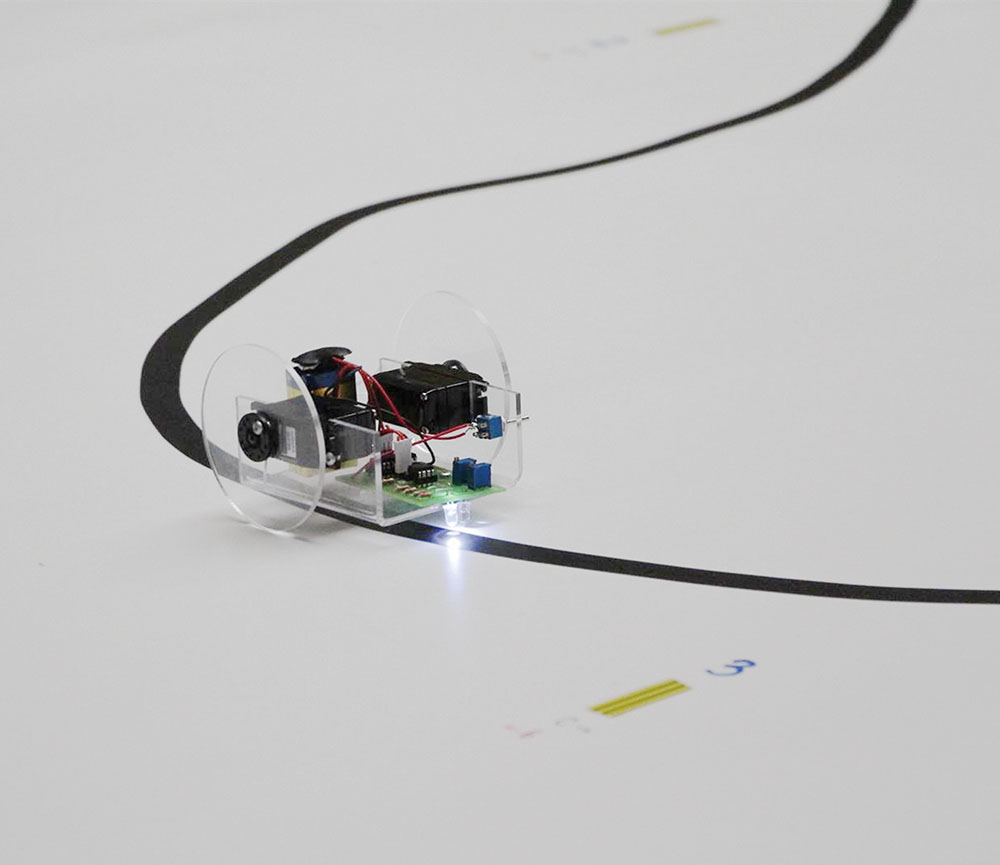
ROBOSLED je mobilni robot, ki samostojno sledi črni črti na beli podlagi. Napajan je z eno 9 V baterijo, poganjata ga dva predelana servomotorčka. Črno črto zaznava s pomočjo fotodiode. ROBOSLED ne vsebuje mikrokontrolerja, zato ga ni potrebno programirati.
Postopek za izdelavo robota ROBOSLEDA:
- Prilagodimo elektroniko servomotorjev in motorjem omogočimo vrtenje za 360o.
- Tiskano vezje po potrebi obrežemo, izvrtamo potrebne luknje (0,8 mm do 1 mm) za pritrditev elektronskih elementov, pritrditev ploščice (3 mm) in nastavljanje potenciometrov ter prispajkamo potrebne elektronske elemente na tiskano vezje.
- Na ohišje robota izžagamo in izvrtamo luknje za pritrditev motorjev, stikalo za vklop/izklop robota in distančnikov za pritrditev tiskanega vezja.
- Pritrdimo motorja in stikalo na ohišje robota, nato jih z žicami povežemo s tiskanim vezjem in tudi tiskano vezje pritrdimo. Na motorje pritrdimo kolesa.
- Na ohišju izrežemo luknjo za svetlobni senzor in svetlečo diodo.
- Pritrdimo še baterijo, vklopimo robota, nastavimo potenciometre robota in preizkusimo delovanje robota.
Ta vsebina je samo za naročnike

Prilagoditev servomotorjev
Servomotorja moramo prilagoditi mehansko in elektronsko.
A. Mehanska prilagoditev
Mehansko prilagodimo servomotorja, da se bosta lahko neomejeno vrtela za cel krog (360o).
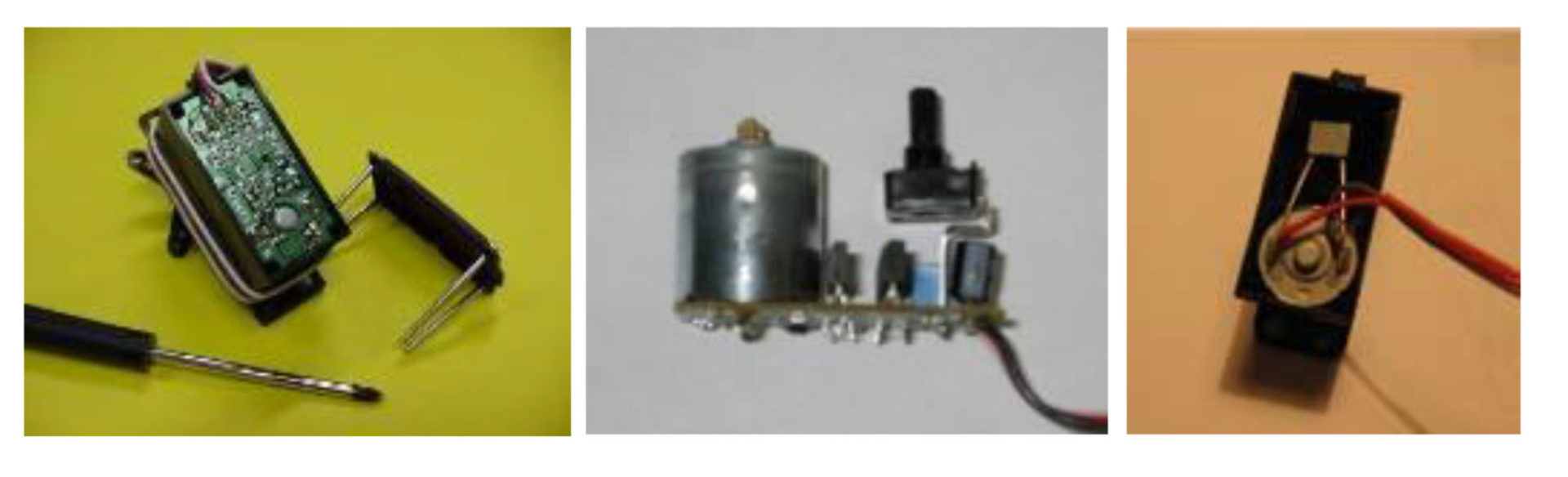
Na zadnjem delu ohišja odvijemo vijake in odstranimo pokrov servomotorja (slika 1).
Na strani, kjer je bila pritrjena prirobnica motorja, snamemo pokrovček in pridemo do zobniškega prenosa servomotorja (slika 2).
Črnemu zobniku na sliki z nožem odstranimo trn, ki preprečuje neomejeno vrtenje (slika 3).
Sestavimo zobnike, kot so bili pred našim posegom, in jih pokrijemo s pokrovčkom.
V nadaljevanju pazite, da se vam ta del pokrovčka ne sname. Če imate težave, ga lahko prilepite na ohišje z lepilnim trakom.
B. Elektronska prilagoditev
Servomotor obrnite tako, da boste videli tiskano vezje (slika 5).
Vzemite majhen ploščat izvijač in s pomočjo vzvoda (konico izvijača vtaknete v luknjico v vogalu ohišja – glej predhodno sliko) previdno dvignite tiskano vezje iz ohišja servomotorja. Izvlečeno tiskano vezje je prikazano na sliki 6.
S tiskanega vezja odspajkajte motor. Pri tem uporabite pumpico za cin. S spajkalnikom segrejte del, kjer je prispajkan motor in odsesajte cin.
S ploščice odspajkate tudi priključke in jih prispajkate neposredno na motor. Uporabite rdečo in rjavo žico. Na motor prispajkate tudi kondenzator, ki odpravlja nezaželene motnje (slika 7).
Predelano elektroniko servomotorja damo nazaj v ohišje, kot je bilo pred predelavo, in z vijaki privijemo pokrov. Priklopimo motorček na baterijo in preverimo, ali deluje pravilno in ali ne preskakuje.
Črna žica: minus na bateriji
Rdeča žica: + 9 V
Spajkanje elektronskih elementov na tiskano vezje
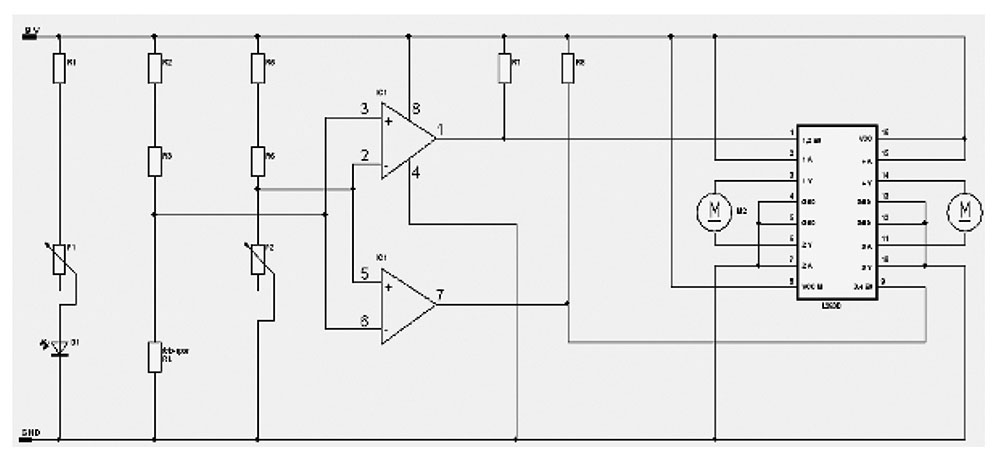
Električna shema vezja na tisku je prikazana na sliki (slika 8). Povečana shema je tudi v prilogi 3.


Vrednosti elementov:
R1 = 220 Ω
R2, R5 = 10 kΩ
R7, R8 = 2.2 kΩ
P1 = 1 kΩ precizni potenciometer
P2 = 50 kΩ precizni potenciometer
R3, R6, R7 = mostične povezave
D1 = visoko svetilna bela LEDica
R4 = foto-dioda 940Nm
IC1 = LM393 (primerjalno vezje)
IC2 = L293D (ojačevalno vezje)
Postopek spajkanja
Pripravimo si delovno orodje za postopek spajkanja (priloga 1). Potrebujemo: spajkalnik, gobico za čiščenje spajkalne konice, cin, ploščate klešče, pumpico za odspajkovanje, pinceto.
Spajkalnik vključimo na napetost in počakamo nekaj minut, da se konica segreje.
Spajkati pričnemo od najnižjega elementa proti najvišjemu.
Najprej zaspajkamo mostične povezave. V vezju imamo tri mostične povezave.
Nato zaspajkamo vse upore. Upore predhodno ukrivimo s ploščatimi kleščami.
Spajkamo torej upore R1, R2, R5, R7, R8.
Sledi spajkanje merilnih ušes. Za merilna ušesa uporabimo ostanke nogic od prej zaspajkanih uporov. Merilni ušesi sta R3, R6.
V tiskano vezje zaspajkamo podnožja integriranih vezij IC1 in IC2.
Zaspajkamo potenciometre P1 in P2.
Svetlečo diodo in fotodiodo zaspajkamo v D1 in R4, pri tem moramo paziti, da pravilno obrnemo oba elementa.
Na koncu prispajkamo priključke za motor M1 in M2.
Umerjanje robota
Za umerjanje robota potrebujemo belo in črno podlago. Najprej robota – fotoupor postavimo na belo podlago in na mostiču R3 izmerimo napetost. Postopek ponovimo in izmerimo napetost na črni podlagi.
Sedaj merimo napetost na mostiču R6. S potenciometrom P2 poizkušajmo nastaviti napetost, kakršno ima fotoupor na beli podlagi.
Ko smo nastavili vhodne napetostne nivoje, je potrebno samo pravilno priključiti motorje in robot bo sledil črti.
Delovanje vezja robosleda
Vezje ROBOSLEDA priključimo na napajalno napetost 9 V. Za napajanje lahko uporabimo baterijo ali akumulator. Z napetostjo zagotovimo, da sveti dioda D1. Upor R1 skrbi za zaščito diode D1. S potenciometrom P1 lahko nastavljamo svetilnost bele LEDice D1.
Vhod v primerjalno vezje ustvarjata dva delilnika napetosti. Prvi delilnik tvorita upor R2 in fotoupor, drugega pa upor R5 in potenciometer P2. Naloga vezja IC1 – primerjalno vezje – je, da primerja dve napetosti in če je napetost na vhodu 2 in 5 večja kot napetost na vhodu 3 in 6, je izhod 1 = + 5 V, izhod 7 = 0 V. V nasprotnem primeru je izhod 1 = 0 V, izhod 7 = + 5 V.
Pri umerjanju moramo meriti napetost med R3 in maso in R6 in maso približno enako. Robot naj bo na beli podlagi. S spremembo podlage iz bele na črno se spremeni tudi upornost fotoupora in s tem tudi razmerje v delilniku napetosti. Spreminjamo lahko samo napetost v mostiču R5, P2 z vrtenjem potenciometra P2. V kolikor se spremenijo razmere na vhodih v primerjalno vezje, se spremenita tudi izhoda iz primerjalnega vezja.
Z izhoda iz primerjalnega vezja peljemo signal na vhod ojačevalnega vezja. S pomočjo izhodov iz primerjalnega vezja vklopimo oz. izklopimo motorja M1 in M2. Na ojačevalnik pripeljemo napetost, s katero krmilimo motor in znaša 9 V.
Če ROBOSLED potuje po beli podlagi, se svetloba LEDice D1 močneje odbije do fotodiode, zaradi česar ima fotodioda R4 manjšo upornost. Če smo prav nastavili polariteto motorjev, mora v tem primeru robot zavijati proti črti. Ko robot pride do črte, jo zazna, zaradi česar se vključi drugi motor, saj se svetloba drugače odbija od črne podlage. Stanje v delilniku je sedaj drugačno, kot če je senzor na beli podlagi.
{kind=link}