 Science/AAAS
Science/AAAS
2018_263_10
Mehki robotski sistemi so najprimernejši za nestrukturirane in dinamične naloge in okolja, zaradi sposobnosti prilagoditve na spremembe, ne da bi poškodovali sebe ali karkoli drugega v svoji bližini. Ta sposobnost je nujna za interakcijo med roboti in ljudmi.
Ta vsebina je samo za naročnike
 Trenutno mehke sisteme omejujejo mehki aktuatorji, ki jih poganjajo. Do sedaj so bili najmehkejši aktuatorji osnovani na pnevmatiki, ali “spominskih” zlitinah, ki se lahko deformirajo, nato pa se ob segretju povrnejo v prvotno obliko. Problemi obstoječih aktuatorjev so učinkovitost, odzivni čas in neprenosnost. Dielektrične elastomerne aktuatorje (DEA-je) kontroliramo in napajamo električno in se odlično obnesejo v aplikacijah, kjer se simulira gibanje mišic. Problemi, ki se pri njihovi uporabi pojavljajo so, da jih moramo pred uporabo raztegniti, pri tem potrebujejo trden okvir
Trenutno mehke sisteme omejujejo mehki aktuatorji, ki jih poganjajo. Do sedaj so bili najmehkejši aktuatorji osnovani na pnevmatiki, ali “spominskih” zlitinah, ki se lahko deformirajo, nato pa se ob segretju povrnejo v prvotno obliko. Problemi obstoječih aktuatorjev so učinkovitost, odzivni čas in neprenosnost. Dielektrične elastomerne aktuatorje (DEA-je) kontroliramo in napajamo električno in se odlično obnesejo v aplikacijah, kjer se simulira gibanje mišic. Problemi, ki se pri njihovi uporabi pojavljajo so, da jih moramo pred uporabo raztegniti, pri tem potrebujejo trden okvir
za pritrditev, za nameček pa za linearne gibe potrebujemo zelo kompleksne strukture DEA-jev.
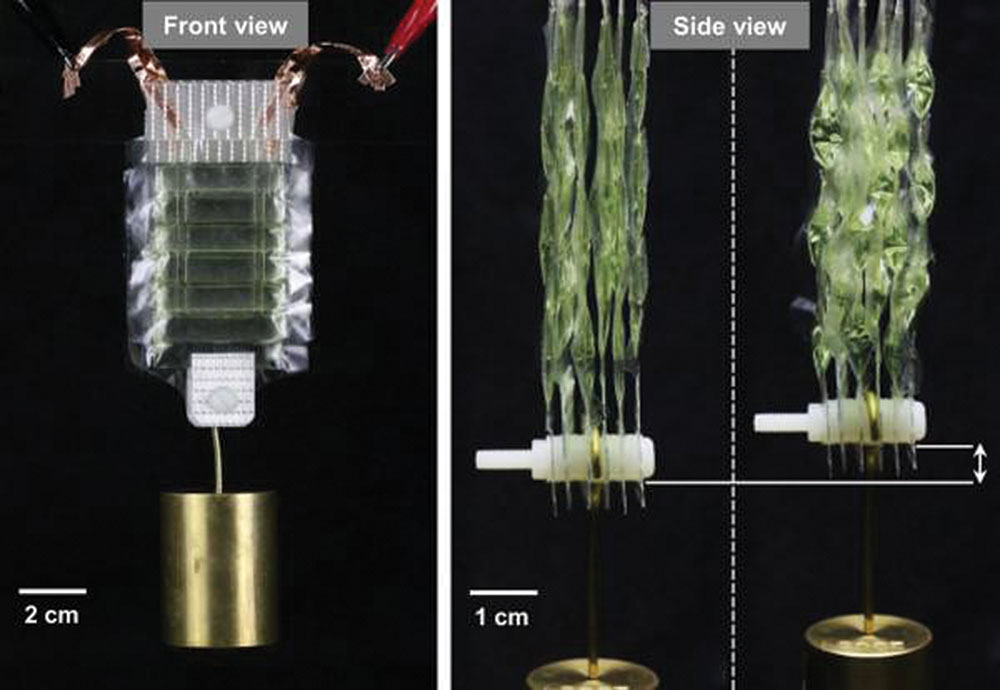
Sedaj je na razpolago razred mehkih elektrohidravličnih pretvornikov, imenovanih Peano-HASEL aktuatorji, ki združujejo dobre lastnosti aktuatorjev osnovanih na tekočinah in elektrostatičnih aktuatorjev in odpravljajo veliko pomanjkljivosti obeh. Ti aktuatorji uporabljajo za linearne pomike ob priključeni napetosti tako elektrostatične, kot hidravlične principe delovanja, pri tem pa je odziv podoben mišičnemu. Prihranjene so nam težave s trdnimi okvirji, raztezanje, ter zapletene konfiguracije. Prototipi so pokazali zmožnost nadzorovanega krčenja do deset odstotkov, hitrost raztezka 900% na sekundo za aktuacijo pri 50Hz, ter zmožnost dviga 200-kratnika lastne mase. Dodatno pa ti aktuatorji nudijo še optično transparentnost in samozaznavanje lastnega stanja skrčenosti.
Ta razred aktuatorjev veliko obeta v aplikacijah kot so aktivne proteze, medicinska in industrijska avtomatika ter avtonomne robotske naprave.
Povzeto po: http://robotics.sciencemag.org/content/3/14/eaar3276
{kind=link}