![]()
Zdaj poznamo teorijo, na kateri temelji programiranje z lestvično logiko in poznamo ukaze, s katerimi lahko naredimo katerokoli funkcijo. Seveda pa je v praksi potrebno včasih uporabiti veliko elementov, ukazov in biti zelo spreten ter domiseln, da je vse skupaj sestavljeno tako, da deluje po naših zamislih.

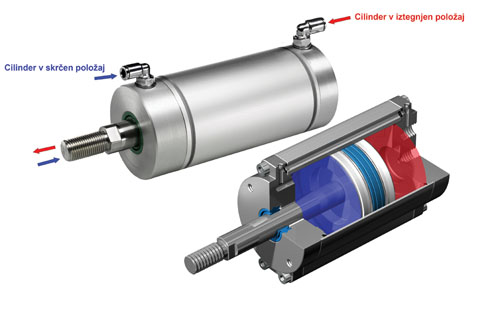
Za tiste bralce, ki se doslej še niso srečali s pnevmatskimi hidravličnimi ali električnimi cilindri, manipulatorji, naj na hitro pojasnim njihovo delovanje, ki je dobro prikazano na sliki 1.
Njihov glavni namen je ustvariti nek linearni premik z neko določeno silo. Običajno ima dva končna položaja, obstajajo pa tudi kombinacije dveh ali več cilindrov, ki omogočajo tudi točno določene vmesne položaje. S kombinacijo 3 in 5 cm dolgih cilindrov imamo lahko na primer 0, 3, 5 in 8 cm linearnega hoda, torej oba končna in dva vmesna položaja.
Sam cilinder je cilindrične oblike, že zato, ker ima v notranjosti bat s tesnili, ki potuje po cilindru. Na bat je pritrjena os, ki se premika po zatesnjeni puši in ki zunanji svet povezuje z gibljivim delom cilindra, to je z batom. Stisnjen zrak (recimo 10 Barov) ali tekočino spustimo pod visokim tlakom na eno ali drugo stran bata, istočasno pa omogočimo, da ima zrak ali tekočina na drugi strani bata prosto pot, da lahko med gibanjem bata neovirano odteka iz cilindra.

Električne izvedbe takšnih cilindrov so z vidika uporabe še bolj praktični, saj ne potrebujemo niti stisnjenega zraka, niti visokotlačnih črpalk, so pa seveda cenovno manj ugodni, saj je njihova konstrukcija veliko bolj zahtevna. To je v glavnem vsa umetnost cilindrov, ki so lahko različnih oblik in velikosti.
Imamo tudi rotacijske »cilindre«, ki so običajno kombinacija dveh običajnih cilindrov, ki potiskata dve zobati letvi, ki linearni premik obeh cilindrov prenese na zobnik, ki je neposredno ali prek dodatnega prenosa povezan z neko osjo.
Na sliki 3 je tipični primer pretvorbe linearnega gibanja v vrtenje, kjer je ozobljena os nameščena med dvema zobatima letvama. Cilindra sta povezana tako, da se zobati letvi vedno gibljeta v nasprotni smeri, zato zrak z velikim tlakom dovajamo zgornjemu cilindru z leve strani in na spodnjemu z desne, če želimo, da se os zavrti v smeri urinih kazalcev (vse puščice rdeče barve). Nasprotno bi zgornjemu cilindru zrak ali tekočino dovajali na desnem priključku in spodnjemu na levem, če bi želeli, da se os rotacijske enote zavrti v nasprotni smeri urinih kazalcev (vse puščice modre barve).
MiniPLC – krmilnik – Trgovina
Programiranje mikrokontrolerjev z lestvično logiko LDmicro (4)
2014_SE225_37
{kind=link}