Razvoj aplikacij, kot so varnostni sistemi in brezžične medicinske nadzorne naprave, je odvisen od več dejavnikov, ki zagotavljajo uspešno zasnovo, vendar sta lahko kompleksnost načrtovanja in energetska učinkovitost med najpomembnejšimi, ko gre za baterijsko napajane in povezane aplikacije.
Microchip Technology Inc.
Avtor: Stian Sogstad
2022-305-17
To je zato, ker daljša kot je življenjska doba baterije za končno uporabo, nižja mora biti povprečna poraba energije.
Da bi bolje izpolnili zahteve po energiji za te aplikacije, hkrati pa omogočili zanesljive in dolgotrajne zasnove, bi morali razvijalci najprej razmisliti o majhnih in energetsko učinkovitih mikrokontrolerjih (MCU) s pametnimi, izpopolnjenimi vgrajenimi funkcijami in funkcionalnostmi. Takšni MCU-ji so sposobni obvladati večino nalog, ki jih zahteva aplikacija, kar zmanjšuje potrebo po zunanjih pasivnih komponentah v zasnovi senzorskega vozlišča, hkrati pa prinaša nizko porabo in vgrajene funkcije za dodatno prilagodljivost in preprostost.
Na primer, pri načrtovanju baterijsko napajanih senzorskih vozlišč za aplikacijo, kot je domači varnostni sistem, je pasivni infrardeči (PIR) detektor gibanja pogosto nameščen znotraj in zunaj stanovanja. PIR senzor zazna spremembe v količini infrardečega sevanja, ki ga “vidij” senzorski element, in se razlikuje glede na temperaturo in značilnosti površine predmeta pred senzorjem.
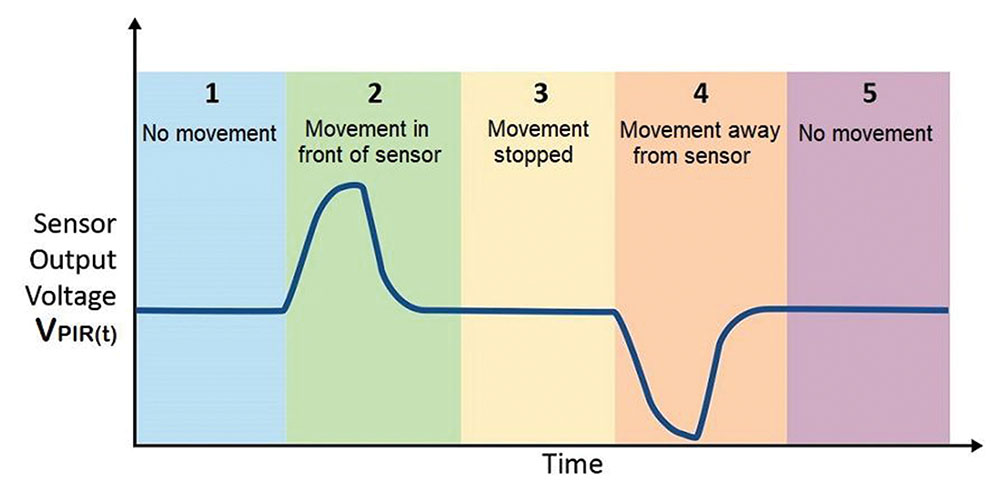
Ko oseba prehaja med senzorjem in ozadjem, senzor zazna spremembo temperature okolja, ki se je spremenila v temperaturo telesa in nazaj v temperaturo okolja. Nastalo spremembo vhodnega infrardečega sevanja pretvori v spremembo izhodne napetosti (VPIR(t)). Drugi predmeti z enako temperaturo kot ozadje, vendar z različnimi značilnostmi površine, bodo prav tako povzročili, da senzor zazna drugačen vzorec emisij, kot je prikazano na sliki 1.
Raven izhodnega signala iz PIR senzorja je običajno zelo nizka in je manjša od 1 mV. Da bi zaznali gibanje in preprečili napačno zaznavanje, je treba analogni signal ojačiti, preden ga vzorči analogno-digitalni pretvornik (ADC).
V tipičnih PIR rešitvah je to doseženo z uporabo večjim številom stopenj operacijskega ojačevalnika z visokim ojačenjem, kar posledično poveča kompleksnost zasnove, število komponent, energijsko učinkovitost, stroške in drugo. Nadaljujte z branjem, če želite izvedeti, kako lahko majhen in energetsko učinkovit MCU pomaga zmanjšati te učinke.
Kompleksnost razvoja
Utemeljitev zasnove vozlišča PIR senzorja na majhnem MCU-ju s primernim naborom funkcij, kot je 12-bitni diferencialni ADC s programirljivim ojačevalnikom ojačenja (PGA), zmanjša potrebo po zunanjih komponentah, prostoru na plošči in strošku uporabljenega materiala (BoM). Razmislite o PIR Click senzorju podjetja MickroE. To je tiskano vezje (TIV) z vsemi pasivnimi komponentami za izdelavo delujočega vozlišča PIR senzorja.
Click plošča temelji na rešitvi operacijskega ojačevalnika, vključno z ADC-ji, upori in kondenzatorji, in je narejena tako, da deluje takoj, kar je idealno za enostavno izdelavo prototipov in razvoj. Tipična nastavitev za enostavno izdelavo prototipov je lahko uporaba plošče PIR click v kombinaciji z Microchip Curiosity Nano Base za Click boards™ [1] in razvojnim kompletom Curiosity Nano [2].
Rešitvi vozlišča PIR senzorja lahko koristi uporaba MCU, kot je ATtiny1627 Microchip Technology, ki ima 12-bitni diferencialni ADC in PGA. Število zunanjih komponent je mogoče znatno zmanjšati z odpravo potrebe po zunanjem operacijskem ojačevalniku za ojačenje signala. To in pa zunanji ADC, omogočata odstranitev večjega števila drugih pasivnih komponent, kot so upori in kondenzatorji.
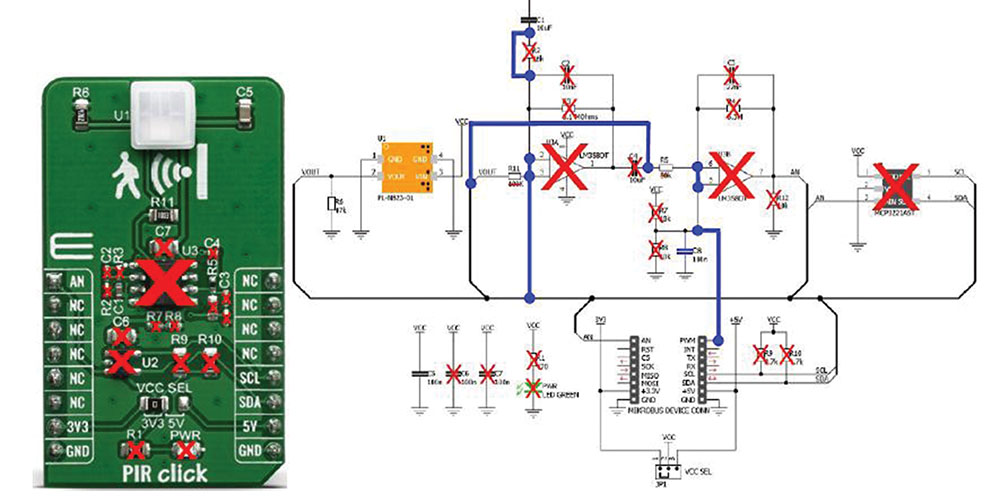
Torej, z uporabo takega MCU-ja, je lahko postavitev TIV PIR click znatno manjša. Slika 2 prikazuje, kako je mogoče odstraniti komponente (X) in kako je mogoče vzpostaviti nove povezave (modre črte).
Opomba: V tem primeru je PIR click uporabljen kot osnova za modifikacije, ker je bilo bolj priročno kot načrtovati nov TIV in pridobiti zahtevane komponente. Ta spremenjena rešitev ne tekmuje z namenom Click plošč.
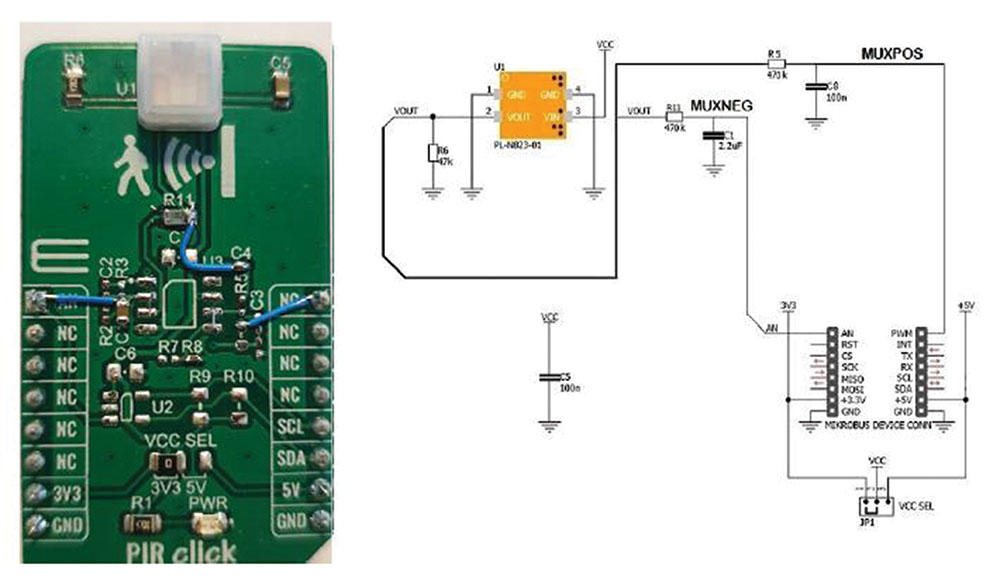
S temi spremembami, ki izkoriščajo prednost vgrajenega 12-bitnega diferencialnega ADC-ja in PGA, slika 3 tudi ponazarja, kako malo zunanjih komponent je potrebnih, ko je izbran pravi MCU.
Z manjšim številom zunanjih komponent bosta zasnova strojne opreme in TIV-a pregledna in bolj kompaktna, saj je pri nameščanju zunanjih komponent manj pomislekov glede strojne opreme. Poleg tega sta lahko programska in ugnezdena programska oprema bolj kompaktni in učinkoviti, saj se več nalog obravnava v MCU-ju. Upravljanje časa in sinhronizacije bosta tudi lažji.
Ko se velik del kompleksnosti zasnove senzorskega vozlišča premakne iz strojne opreme v MCU in centralno procesno enoto (CPU) in upravlja v programski opremi, postane bolj prilagodljiva za spreminjanje in dodajanje funkcionalnosti med razvojnim procesom – ne da bi porabili čas za preoblikovanje postavitve plošče, s čimer prihranimo čas in stroške razvojnikov.
Prav tako postane bolj priročno optimiziranje kode za druge dejavnike, kot je poraba energije. Preprosto spreminjanje nastavitev parametrov bo razvijalcem omogočilo, da spremenijo kodo aplikacije, da dodajo funkcionalnost ali optimizirajo kodo za zmanjšano porabo energije ali občutljivost, povezano z okoljskimi pogoji, kot so spremembe temperature okolice, saj senzorji težko zaznajo človeka, ko okolica temperatura presega 30°C.
Drug primer dodane funkcionalnosti bi lahko bilo dodajanje strojnega učenja za prepoznavanje vzorcev gibanja in učenje sistema, da se nauči ločiti, kaj je samo šum ali se premika dejanska oseba ali žival itd.
Za aplikacije za zaznavanje gibanja, ki uporabljajo PIR senzorje, MCU-ji, kot je ATtiny1627, premaknejo kompleksnost s strojne opreme na strojno in programsko opremo, saj je toliko potrebnih funkcionalnosti vgrajenih v MCU. S tem se zmanjša kompleksnost, hkrati pa se pridobi fleksibilnost.
Učinkovitost porabe energije
Poraba energije brezžičnih senzorskih vozlišč je ključna. To je zato, ker daljša kot je življenjska doba baterije, daljša je življenjska doba senzorskega vozlišča in s tem življenjska doba celotnega senzorskega omrežnega sistema. To velja za vse brezžične senzorske sisteme. Če je nameščenih na desetine, stotine ali tisoče senzorjev za različne vrste spremljanja, se bo vozlišče štelo za mrtvo ali nefunkcionalno, če se izklopi.
Za večje senzorske sisteme zamenjava baterije ali samega vozlišča pomeni dodaten strošek za končnega uporabnika, pa tudi, da sistem ne deluje ali ne deluje v celoti, ko je vozlišče izklopljeno, zato se lahko pojavijo neželeni incidenti brez obveščanja. Zato dlje kot lahko baterija zdrži, tem bolje.
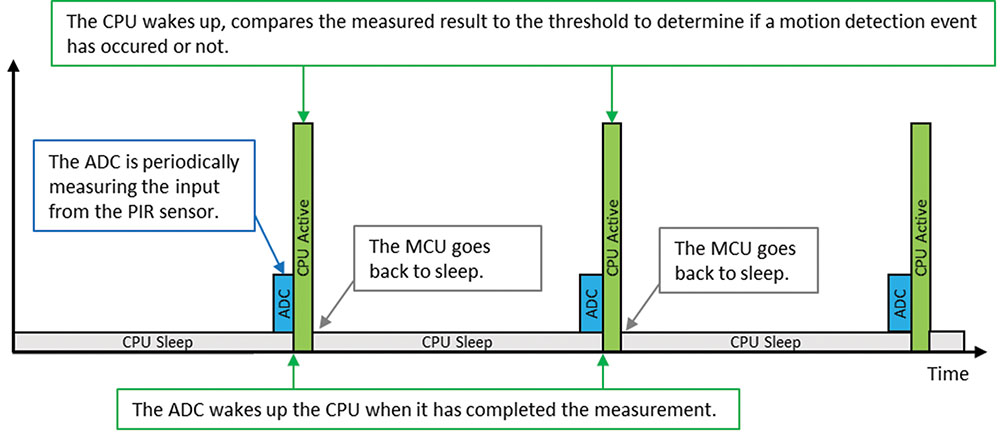
Zaradi načinov mirovanja MCU in hitrega časa prebujanja lahko vsako od senzorskih vozlišč porabi najmanj energije. Vozlišče lahko spi, nato pa se hitro zbudi, ko zazna gibanje zaradi spremembe temperature v območju senzorja, nato obdela signal in se nato vrne v stanje spanja, tako da vsako vozlišče, ki ga napaja baterija, deluje dlje – brez menjave baterije.
Glejte sliko 4, če želite videti, kako CPU deluje, ko izkoriščate prednosti načinov mirovanja in hitrega prebujanja. Poraba energije je odvisna od aplikacije in se bo razlikovala glede na konfiguracijo PIR senzorja, čas zajemanja vzorca in parametre filtriranja, kar bo vplivalo tudi na območje zaznavanja in/ali občutljivost. Razmislite o prilagoditvi teh parametrov, da dodatno zmanjšate porabo energije v časih, ko so zahteve aplikacije nižje.
S ponudbo pametnih in sofisticiranih vgrajenih funkcij in funkcionalnosti, ki izboljšujejo trenutno porabo in energijsko učinkovitost, bodo majhni in zmogljivi MCU-ji, kot je ATtiny1627, podaljšali življenjsko dobo baterijskih in povezanih aplikacij, hkrati pa zmanjšali kompleksnost načrtovanja, skupne sistemske stroške in čas do trženja. Če želite izvedeti več o razvoju nizke porabe in stroškovno učinkovite aplikacije za zaznavanje gibanja PIR, se obrnite na www.microchip.com.
Viri:
https://www.microchip.com/en-us/development-tool/AC164162
https://www.microchipdirect.com/dev-tools/DM080104
Opomba: Ime in logotip Microchip sta registrirani blagovni znamki podjetja Microchip Technology Incorporated v ZDA in drugih državah. Vse druge blagovne znamke, ki so morda tu omenjene, so last njihovih podjetij.
https://www.microchip.com

{kind=link}